Регулирующие устройства и автоматические регуляторы — Студопедия
ОГЛАВЛЕНИЕ
Раздел 3. Регулирующие устройства, и автоматические регуляторы, исполнительные механизмы, интерфейсные устройства
3.1. Регулирующие устройства и автоматические регуляторы.
3.2. Исполнительные механизмы.
3.3. Интерфейсные устройства.
Регулирующие устройства, и автоматические регуляторы, исполнительные механизмы, интерфейсные устройства
Регулирующие устройства и автоматические регуляторы.
В стандарте DIN 19226 дается следующее определение понятия «регулирующее устройство» и «регулятор»:
Регулирующее устройство – это приборы, которые необходимы непосредственно для воздействия на объект регулирования в соответствии с поставленной задачей. В состав регулирующего устройства входят как минимум одно устройство для регистрации регулируемой величины x и для сравнения с задающей величиной w, а также одно устройство для формирования регулирующей величины y.
Регулятор – это прибор, который в рамках регулирующего устройства объединяет в себе выполнение нескольких функций, присущих регулирующему устройству. Однако для регулятора обязательно наличие сравнивающего устройства, а также как минимум еще одного важного функционального элемента, например усилителя или схемы задержки.
Автоматический регулятор — это устройство (совокупность устройств), посредством которого осуществляется процесс автоматического регулирования. Функционирование автоматического регулятора происходит в соответствии с алгоритмом регулирования, под которым понимают математическое выражение функциональной зависимости выходной величины регулятора от входной. Основная задача регуляторов заключается в формировании такого управляющего воздействия на объект регулирования в зависимости от измеренных отклонений регулируемой величины, чтобы восстановить требуемое состояние объекта. Автоматические регуляторы классифицируются по различным признакам (рис.3.1).
В зависимости от возможности изменять свой режим работы регуляторы подразделяются на два класса:
— детерминированные регуляторы не изменяют своих параметров в процессе регулирования;
— регуляторы с настройкой — экстремальные и адаптивные. Экстремальные — непрерывно производят поиск оптимальных значений выходных величин объекта. В адаптивных регуляторах происходит настройка параметров с целью достижения оптимального качества регулирования при изменении характеристик объекта во время его работы.
По наличию дополнительных источников энергии различают регуляторы:
— Регуляторы прямого действия управляют регулирующим органом за счет энергии, получаемой от регулируемой среды, и не требуют вспомогательной энергии.
— Регуляторы непрямого действия. В них имеются усилители мощности, управляющие поступлением энергии от постороннего источника. При этом в зависимости от вида используемой энергии различают электрические, пневматические, гидравлические и комбинированные регуляторы.
В зависимости от характера воздействия на объект имеются
— регуляторы непрерывного действия — обеспечивают непрерывное изменение регулирующего воздействия. Во многих случаях к ним относят и регуляторы с импульсным перемещением регулирующего органа.
— регуляторы дискретного действия — изменяют регулирующее воздействие только в определенные моменты времени, в интервале между которыми регулирующее воздействие постоянно.
В зависимости от вида квантования входного сигнала подразделяются на:
— релейные;
— импульсные;
— цифровые.
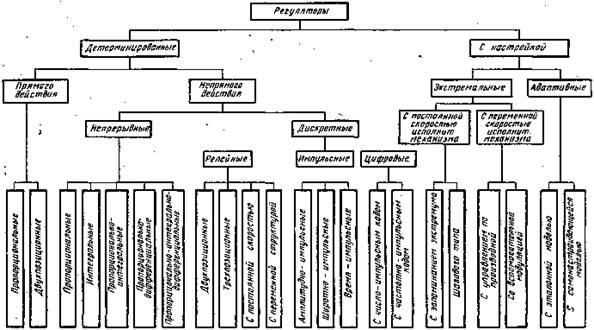
Рис.3.1. Классификация автоматических регуляторов дискретного действия
В соответствии с реализуемым законом регулирования регуляторы делятся на:
— пропорциональные;
— интегральные;
— пропорционально-интегральные;
— пропорционально-дифференциальные;
— пропорционально-интегрально-дифференциальные;
— релейные двух- и трехпозиционные и релейные с механизмами постоянной скорости.
По способности изменять свою структуру различают регуляторы:
— с фиксированной структурой — не изменяют свою структуру при изменении характеристик объектов регулирования;
— с переменной структурой – у них структура изменяется при изменении свойств объекта.
— линейные;
— нелинейные.
В зависимости от конструктивного исполнения имеются регуляторы:
— приборного типа — в системе регулирования включается последовательно со вторичным прибором, в котором формируется сигнал ошибки;
— аппаратного типа — сами формируют сигнал ошибки и обычно включаются параллельно вторичному прибору;
— агрегатного типа – в них используется агрегатный принцип построения используется при стандартных сигналах на выходе датчиков. Такой принцип рекомендован ГСП и позволяет подключать любой стандартизованный датчик непосредственно к унифицированному входу регулятора.
В соответствии с числом регулируемых величин регуляторы подразделяются на:
— одномерные;
— многомерные.
Регуляторы классифицируются также по классу систем и фирмам-изготовителям.
Линейные регуляторы – это регуляторы, которые позволяют реализовать теоретические (стандартные) законы регулирования, называются идеальными. В этих регуляторах операции интегрирования, дифференцирования, суммирования и умножения на постоянный коэффициент выполняются абсолютно точно. Рассмотрим динамические характеристики регуляторов с различными стандартными законами регулирования.
Пропорциональные (П) регуляторы.
Закон регулирования П-регулятора выражается уравнением:
y = kpx
где kp — коэффициент пропорциональности, являющийся параметром настройки П-регулятора.
У пропорциональных регуляторов отклонение регулируемой величины X от ее заданного значения Х0 вызывает перемещение регулирующего органа на величину, пропорциональную этому отклонению x = Х0 — X.
Передаточная функция П-регулятора имеет вид:
Wп(p) = kp
Переходная характеристика П-регулятора показана на рис.3.2, а.
Величину, обратную коэффициенту пропорциональности регулятора, т.е. δ

Рис.3.2. Переходные характеристики линейных идеальных регуляторов
Особенностью систем регулирования с П-регулятором является изменение регулируемой величины при различных нагрузках регулируемого объекта. Объясняется это тем, что перемещение регулирующего органа в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Разность между максимальным и минимальным установившимися значениями регулируемой величины х
Интегральные (И) регуляторы.
Процесс регулирования И-регулятором происходит по закону, который описывается уравнением:

где Ти — постоянная времени интегрирования, являющаяся параметром настройки И-регулятора.
Интегральные регуляторы производят перемещение регулирующего органа пропорционально интегралу отклонения регулируемой величины до тех пор, пока не восстановится ее заданное значение.
Передаточная функция И-регулятора имеет вид:
Wи(р) = 1/Тиp
Переходная характеристика И-регулятора показана на рис.3.2, б. Интегральный регулятор не обладает остаточной неравномерностью, что является его положительной особенностью.
Пропорционально-интегральные (ПИ) регуляторы.
Закон регулирования ПИ-регулятора выражается уравнением:

где Ти — время интегрирования регулятора, или время изодрома. Коэффициент пропорциональности kp и постоянная времени Ти являются параметрами настройки ПИ-регулятора.
Уравнение закона регулирования ПИ-регулятора состоит из двух составляющих регулирующего воздействия: kpx — пропорциональной и  — интегральной. Передаточная функция ПИ-регулятора имеет вид:
— интегральной. Передаточная функция ПИ-регулятора имеет вид:
WПИ(р) = kp(Тиp + 1)/Тиp
В динамическом отношении ПИ-регулятор представляет собой систему из двух параллельно включенных регуляторов: пропорционального и интегрального. При увеличении времени изодрома до бесконечности ПИ-регулятор превращается в П-регулятор. Если kp и Ти стремятся к нулю, но их отношение остается постоянным, то получим И-регулятор. Пропорционально-интегральные, как и интегральные, регуляторы не обладают остаточной неравномерностью. Переходная характеристика ПИ-регулятора показана на рис.3.2,
Пропорционально-дифференциальные(ПД) регулятор.
Закон регулирования ПД-регулятора выражается следующим уравнением:

где Тд — время дифференцирования, или время предварения регулятора, характеризующее степень влияния воздействия по производной на величину регулирующего воздействия. Коэффициент пропорциональности kp и постоянная времени Тд ПД-регулятора являются параметрами его настройки.
Передаточная функция ПД-регулятора:
WПД(р) = kp(1 + Тдp)
Пропорционально-дифференциальный, как и пропорциональный, регулятор обладает остаточной неравномераостью, величина которой определяется выражением хшах = 1/kр.
Однако дополнительное воздействие по скорости отклонения регулируемой величины от заданного значения положительно влияет на процесс регулирования. Это является преимуществом ПД-регуляторов по сравнению с П-регуляторами. Переходная характеристика ПД-регулятора показана на рис.3.2, г.
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы.
Закон регулирования ПИД-регулятор а определяется уравнением:

Параметрами настройки ПИД-регулятор а служат коэффициент пропорциональности kр и постоянные времени Тя и Тя.
Передаточная функция имеет вид:
WПИД(р) = kp(ТдТиp + Тиp + 1)/Тиp
В динамическом отношении эти регуляторы представляют собой систему из трех параллельно включенных звеньев: безынерционного, интегрирующего и идеального дифференцирующего. При ТД = 0 ПИД-регулятор превращается в ПИ-регулятор. ПИД-регуляторы не обладают остаточной неравномерностью. Переходная характеристика ПИД-регулятора показана на рис.3.2, д
Промышленные регуляторы состоят из реальных элементов, поэтому их динамические характеристики отличаются от динамических характеристик, определяемых уравнениями идеальных регуляторов.
Для оценки расхождения характеристик идеального и реального регуляторов передаточную функцию Wp(p) реального регулятора представляют в виде произведения передаточной функции Wид(р) идеального регулятора и передаточной функции Wб(p) некоторого балластного звена:
Wр(р) = Wид(р)Wб(р)
Балластное звено не имеет заранее известной передаточной функции. Разные регуляторы имеют балластные звенья с различными передаточными функциями. С помощью понятия «балластное звено» удобно оценить степень отличия реального и соответствующего идеального регуляторов. В ряде случаев, анализируя балластное звено, можно найти способы приблизить реальный регулятор к идеальному, усовершенствуя его схему или конструкцию. Исследование динамики балластного звена позволяет сделать вывод об особенностях структурной схемы и настройки того или иного реального регулятора.
Если регулятор идеальный, то передаточная функция балластного звена W6(ρ) ≡ 1, его модуль W6(ω) ≡ 1, а фаза φ6(ω) ≡ 0. Чем больше передаточная функция балластного звена отличается от единицы, тем значительнее отличается качество регулирования в системах с идеальными и реальными регуляторами. Степень отличия реального регулятора от идеального для одного и того же типа прибора может быть различной, так как она зависит не только от структурной схемы и конструкции, но и от динамических настроек регулятора. Для регуляторов с нелинейными элементами частотные характеристики балластного звена зависят также от амплитуды входного сигнала.
Область в пространстве амплитуд, частот входного сигнала и параметров настройки регулятора, в пределах которой частотные характеристики идеального и реального регуляторов отличаются на величину, не превышающую некоторое наперед установленное значение, называют областью нормальной работы (ОНР) регулятора.
Частотные характеристики идеального и реального регуляторов согласно установленным нормам могут отличаться по модулю на ±10% и по фазе на ±15%. В пределах этих отклонений различием в динамических характеристиках можно пренебречь, а в расчетах использовать уравнения идеальных регуляторов.
Сопоставление по величине ОНР является удобным и наглядным методом оценки регуляторов, отрабатывающих одинаковый закон регулирования. Обычно оно проводится при одних и тех же заранее выбранных значениях, амплитуды и частоты входного сигнала в координатах параметров настройки регуляторов.
При оценке регулятора обычно исходят из того, что егоприменение целесообразно, если оптимальные значения параметров настройки, лежащие внутри ОНР, соответствуют динамическим характеристикам объектов управления. Из двух однотипных регуляторов, имеющий большую ОНР лучше, так как он в большей мере удовлетворяет требованиям универсальности, поскольку может быть использован на более широком классе объектов.
Если в результате расчета параметров настроек регулятора будут получены данные, не попадающие в ОНР, то нужно выбрать либо другой закон регулирования, либо применить регулятор другого типа, имеющий более широкую область допустимых настроек.
Автоматические регуляторы, формирующие один и тот же закон регулирования, могут быть построены по различным структурным схемам. Каждая из таких структурных схем обладает рядом достоинств и недостатков, которые необходимо учитывать при разработке регуляторов и при их эксплуатации. Анализ структурных схем позволяет не только оценить, насколько характеристики реального регулятора отличаются от характеристик идеального, но и установить причины этих отклонений. Рассмотрим некоторые структурные схемы.
1. П-регуляторы. Типичная структурная схема пропорционального регулятора (рис.3.3, а) состоит из усилительного и интегрирующего звеньев, охваченных жесткой отрицательной обратной связью. Интегрирующим звеном является исполнительный механизм, который служит для преобразования выходного сигнала регулирующего блока в механическое перемещение.
Если усилитель k1 считать безынерционным с конечным значением коэффициента усиления, а исполнительный механизм — идеальным интегрирующим звеном, то передаточная функция регулятора запишется в виде:


Рис.3.3. Структурная схема и переходные характеристики реального линейного П-регулятора
где ТИM — постоянная времени исполнительного механизма. Обозначим Тб = ТИM/δpk1 тогда передаточная функция балластного звена:
W6(p) = 1/(T6p + 1)
Таким образом, реальный регулятор, для которого справедливы названные допущения, можно представить в виде последовательного соединения идеального П-регулятора с коэффициентом усиления kp и балластного звена с передаточной функцией W6(p).
Балластное звено в этом случае будет представлять собой апериодическое звено первого порядка с постоянной времени Тб, величина которой растет с увеличением постоянной времени исполнительного механизма Тим и коэффициента пропорциональности регулятора kр.
Наличие балластного звена в П-регуляторе объясняется конечным значением коэффициента усиления k1. Действительно, если k1 → ∞, то Тб → 0, a Wp(p) = kp = WП(p), т.е. рассматриваемый регулятор становится идеальным. На рис. 88, б приведены переходные характеристики П-регулятора с балластным звеном при различных значениях Тб.
2. ПИ-регуляторы. Имеется несколько разновидностей схем ПИ-регуляторов. Наиболее часто используемая схема изображена на рис.3.4, а. Она представляет собой последовательное соединение усилительного и интегрирующего звеньев, причем первое охвачено отрицательной обратной связью с апериодическим звеном. По такой структурной схеме выполнены регуляторы электронной агрегатной унифицированной системы. Передаточная функция такого регулятора имеет следующий вид:
где kp = ТИ/δрТИМ; s = 1/k1δρ = Tимkр/Тиk1. Обозначим через kδ = l/(s + 1) и Тб = sТи/(s + 1).
С учетом этих обозначений получим передаточную функцию балластного звена в виде:
Wб(р) = kб/(Tбр + 1)
В этом случае балластное звено представляет собой апериодическое звено с коэффициентом усиления k6 и постоянной времени.

Рис.3.4. Структурная схема и переходные характеристики реального линейного ПИ-регулятора.
Для данной структурной схемы коэффициент усиления регулятора зависит от постоянной времени ТИМ интегрирующего звена, т.е. от времени полного хода исполнительного механизма. Известно, что постоянная времени исполнительного механизма в свою очередь зависит от нагрузки, поэтому от нагрузки зависит и kp. В таких регуляторах наблюдается взаимосвязь обоих настроечных параметров — коэффициента усиления kp и времени интегрирования Ти.
Переходные характеристики регулятора со структурной схемой, изображенной на рис. 3.4, а, приведены на рис.3.4, б.
Видно, что при s=0 регулятор становится идеальным. Чем больше значение s, тем сильнее отклонение характеристики реального регулятора от характеристики идеального.
3. ПИД-регуляторы. Эти регуляторы также могут быть построены по различным структурным схемам. Одна из типичных структурных схем изображена на рис.3.5, а. Она позволяет строить ПИД-регуляторы из унифицированных блоков. Для формирования, пропорционально-интегральной составляющей сигнала регулирования используется блок, схема которого показана на рис.3.5, а. Дифференцирующий блок 1 конструктивно может выполняться отдельно от других блоков.
Рис.3.5. Структурная схема и переходные характеристики реального линейного ПИД-регулятора
Передаточная функция регулятора с такой структурной схемой может быть записана в виде:

где 
 ;
; 
 s2=T2/TИ
s2=T2/TИ
В этом случае передаточная функция балластного звена имеет вид:
Это — передаточная функция апериодического звена второго порядка. Максимальное отношение ТД/ТИ = 0,25. Оно достигается при а = 2 или (T2/T1) (k2 + 1) = 1. Это обстоятельство может рассматриваться как недостаток подобных схем, поскольку ограничивает область применения ПИД-регуляторов. Переходные характеристики регуляторов приведены на рис.3.5, б. При  регулятор становится идеальным.
регулятор становится идеальным.
Основные типы регуляторов | Системы электроприводов исполнительных механизмов буровых установок
Страница 3 из 10
Основные типы регуляторов, применяемых в системах управления электроприводами исполнительных механизмов буровых установок
Аналоговые регуляторы в системах подчиненного управления электроприводами строятся на основе операционных усилителей (ОУ) — усилителей постоянного тока с высоким входным и очень низким выходным сопротивлениями. Технология интегральных микросхем позволяет в настоящее время изготавливать высококачественные и недорогие ОУ. В некоторой части своего рабочего диапазона ОУ ведет себя как линейный усилитель напряжения с очень большим коэффициентом усиления (105— 106). Если в схеме ОУ не предусмотрена отрицательная обратная связь с выхода на вход, то из-за высокого коэффициента усиления, он обязательно попадает в режим насыщения. Поэтому схемы регулятора на базе ОУ содержат отрицательную обратную связь.
Операционный усилитель получил свое название благодаря тому, что с его помощью могут выполняться различные математические операции, такие как умножение, суммирование, интегрирование и дифференцирование. Типовые регуляторы строятся на базе инвертирующего усилителя, причем входные и выходные цепи, кроме сопротивлений, могут содержать емкости.
Поскольку коэффициент усиления ОУ велик (Ку = = 105+106), а выходное напряжение Увых ограничено напряжением питания Цп, то потенциал точки А (рис. 1, а) срА = = ивых/Ку близок к нулю, т.е. точка А выполняет функцию кажущейся земли (заземлять точку А нельзя, иначе схема станет неработоспособной).

Рис. 1. Структура аналогового регулятора, выполненного на операционном усилителе (а). Схема пропорционального регулятора с управляемым ограничением выходного сигнала (б). Характеристика вход-выход регулятора с управляемым ограничением выходного сигнала (в)
Схемы, передаточные функции и переходные функции регуляторов различных типов приведены в табл.
Схемы и динамические характеристики различных типов регуляторов
Тип регулятора | Схемы регулятора | Передаточная функция регулятора | Переходная функция регулятора |


Для получения пропорционального регулятора (П-регулятора) на вход и в цепь обратной связи ОУ включают резисторы; интегрального регулятора (И-регулятора) во входную цепь включает резистор, а в цепь обратной связи — конденсатор; ПИ-регулятора во входную цепь-резистор, а в цепь обратной связи — последовательно соединенные резистор и конденсатор. ПИД-регулятор может быть выполнен на одном усилителе с помощью активно-емкостных цепей на входе и в цепи обратной связи.
Промышленностью выпускаются различные типы операционных усилителей на интегральных микросхемах (ИМС) — как круглой, так и прямоугольной формы. Наибольшее распространение для построения регуляторов получили ОУ типов К140УД7, К553УД2, К157УД2 и др.
Уменьшить размеры и повысить надежность устройств аналоговых систем управления электроприводами можно при внедрении гибридной технологии для их изготовления. При изготовлении гибридных интегральных схем (ГИС) активные элементы (ОУ) устанавливаются на печатной плате в твердотельном (бескорпусном) исполнении, а конденсаторы и резисторы — методом пленочной технологии (напылением пленок из проводящих, полупроводящих и непроводящих материалов). Полученный модуль может быть залит компаундом или помещен в корпус.
Ограничение координат электропривода (тока, скорости и др.) осуществляется включением в структуру регулятора внешнего контура регулирования узлов ограничения. Последние могут быть управляемыми и неуправляемыми. На рис., 6 приведена схема ограничения выходного напряжения пропорционального регулятора с отсекающими диодами VD1, VD2 и управляемым опорным напряжением Уоп. Схема позволяет получить несимметричную относительно начала координат характеристику вход-выход с различным уровнем ограничиваемого выходного напряжения (рис.) Возможны и другие варианты схем управляемого ограничения выходного напряжения ОУ с использованием транзисторов.
До последнего времени в автоматизированном электроприводе исполнительных механизмов отечественных буровых установок основное применение получили средства аналоговой вычислительной техники. За последние годы рядом проектных и научно-исследовательских организаций ведутся работы по созданию микропроцессорных систем управления. По сравнению с аналоговыми системами микропроцессорные системы обладают рядом преимуществ. Отметим некоторые из них.
Гибкость. Возможность путем перепрограммирования изменения не только параметров системы управления, но и алгоритмов и даже структуры. При этом аппаратная часть системы остается неизменной. В аналоговых системах потребовалась бы перекомпоновка аппаратной части. Программное обеспечение микроЭВМ можно легко корректировать как в предпусковой период, так и в процессе их эксплуатации. Благодаря этому снижаются затраты и сроки проведения наладочных работ и изменяется их характер, поскольку необходимые эксперименты по определению характеристик и параметров, а также настройка регуляторов могут быть произведены автоматически самой микроЭВМ по заранее подготовленной программе.
Снятие всех ограничений на структуру управляющего устройства и законы управления. При этом показатели качества цифровых систем могут значительно превышать показатели качества управления непрерывных систем управления. Путем введения соответствующих программ могут быть реализованы сложные законы управления (оптимизация, адаптация, прогнозирование и др.), в том числе и такие, которые весьма сложно осуществить с помощью аналоговых средств. Появляется возможность решения интеллектуальных задач, обеспечивающих правильность и эффективность ведения технологических процессов. На основе микроЭВМ могут быть построены системы любых типов, включая системы с подчиненным управлением, многомерные системы с перекрестными связями и др.
Самодиагностика и самотестирование цифровых управляющих устройств. Возможность проверки исправности механических узлов привода, силовых преобразователей, датчиков и другого оборудования во время технологических пауз, т.е. автоматическая диагностика состояния оборудования и раннее предупреждение аварий. Эти возможности дополняются развитыми средствами борьбы с помехами. Главное здесь — замена аналоговых линий передачи информации цифровыми, содержащими гальванические развязки, волоконно-оптические каналы, помехоустойчивые интегральные микросхемы в качестве усилителей и коммутаторов.
Более высокая точность вследствие отсутствия дрейфа нуля, характерного для аналоговых устройств. Так, цифровые системы регулирования скорости электропривода могут обеспечить повышение точности регулирования на два порядка по сравнению с аналоговыми.
Простота визуализации параметров процесса управления путем применения цифровых индикаторов, индикаторных панелей и дисплеев, организации диалогового режима обмена информацией с оператором.
Большая надежность, меньшие габариты, масса и стоимость. Высокая надежность микроЭВМ по сравнению с аналоговой техникой обеспечивается применением больших интегральных микросхем (БИС), наличием специальных систем защиты памяти, помехозащищенности и другими средствами. Благодаря высокому уровню технологии производства БИС снижаются затраты на изготовление систем управления электроприводами. Эти преимущества особо проявляются при использовании одноплатных и однокристальных ЭВМ.
Регуляторы напряжения | Полезные статьи TEPLOCOM
09-03-2013
Типы регуляторов напряжения
Термин регулятор напряжения имеет достаточно широкое трактование.
Свободная энциклопедия «Википедия» определяет регулятор напряжения как электронное устройство дающее возможность менять значение напряжения на выходе.
Более точное определение приводим ниже.
К основным типам регуляторов напряжения относятся:
- регулятор напряжения переменного тока;
- регулятор напряжения постоянного тока;
- делитель напряжения.
Сетевой стабилизатор напряжения, как один из видов регуляторов напряжения
Самым распространенным видом регулятора напряжения является стабилизатор напряжения. Обычно именно сетевой стабилизатор является предметом поискового запроса «регулятор напряжения».
Свободная энциклопедия «Википедия» даёт следующее определение стабилизатора напряжения.
Таким образом стабилизатор напряжения является частным случаем более общего понятия «регулятор напряжения».
Принято различать следующие типы стабилизаторов напряжения:
- релейный стабилизатор;
- симисторный стабилизатор;
- сервоприводный (электромеханический) стабилизатор;
- феррорезонансный стабилизатор.
Компания БАСТИОН является одним из лидеров в производстве стабилизаторов напряжения в России. Компания производит большой ассортимент стабилизаторов напряжения для инженерных систем и бытового использования. Подробнее о стабилизаторах компании БАСТИОН смотрите в разделе Стабилизаторы напряжения.
На следующем видео представлены стабилизаторы напряжения серии TEPLOCOM и SKAT.
Стабилизаторы напряжения компании БАСТИОН производятся в соответствии с требованиями российских ГОСТов и международных стандартов качества ISO 9001.
Заводской срок гарантии — 5 лет!
ЛАТР — лабораторный регулятор напряжения
ЛАТР — лабораторный автотрансформатор, используется для ручного регулирования напряжения. Автотрансформаторы — это специальные трансформаторы, в которых обмотки катушек подключены напрямую, в этом случае используется эффекты магнитной и электрической индукции. Такие приборы имеют более высокий уровень коэффициента полезного действия.
Кроме использования для лабораторных целей, ранее такие устройства использовались для ручного регулирования значения напряжения в быту. В советское время массово выпускались РНО (регуляторы напряжения однофазные), эти простые и дешёвые устройства позволяли вручную регулировать напряжение для питания телевизора. Такие устройства часто использовались в качестве повышающего «стабилизатора» в домах, где напряжение в сети было пониженным.
Цифровой регулятор напряжения для систем управления
В системах автоматизации на промышленных объектах используется ещё один тип регулятора напряжения. Это цифровой регулятор напряжения для изменения скоростей вращения электромоторов путём регулирования значения подаваемого напряжения. Такое устройство используется, как правило, в сложном инженерном оборудовании. Примером может служить устройство для регулирования скорости вращения вентиляторов системы вентилирования в условиях воздействия внешних факторов. В этом случае на скорость вращения будет влиять несколько факторов, в том числе скорость ветра, перепад давления, температура воздуха в помещении и вне помещения. Задача регулирования скорости потока становится многокомпонентной, здесь и используются цифровые регуляторы напряжения.
Фазовый регулятор напряжения
Фазовые регуляторы напряжения предназначены для регулирования уровня напряжения, подаваемого на электрический прибор с помощью механического или электронного управления. Фазовые регуляторы напряжения достаточно широко используются в быту, примером такого использования могут быть светильники с плавным регулированием яркости свечения лампочек. В основе принципа работы таких устройств лежит принцип задержки запускающего импульса с помощью управляемого ждущего мультивибратора. Применяются и схемы с применением цифровых устройств, которые позволяют выполнять задержку импульсов. Возможно использование инверторных схем, в этом случае входное сетевое напряжение на первом этапе преобразовывается в постоянный ток, а на втором этапе моделируется синусоидальное напряжение нужного значения.
Делитель напряжения
Делитель напряжения — это один из видов регуляторов напряжения, позволяюющий разделить входное напряжение на несколько значений. При этом сумма напряжений на выходе устройства равна значению напряжения на входе прибора. Как правтло делители напряжения используются для подведения к различным элементах электрической схемы необходимого напряжения от одного источника питания. На основе использования регуляторов напряжения производятся такие приборы как: электрические фильтры, усилители входного напряжения и параметрические стабилизаторы напряжения.
Читайте также по теме:
Тех. поддержка
Бастион в соц. сетях
Канал Бастион на YouTube
6. Виды регуляторов
Как было показано ранее, наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Устройство, осуществляющее управляющее воздействие, называется регулятором. Регуляторы включают в себя простые динамические звенья, комбинируя которые добиваются требуемых переходных характеристик системы управления при случайных воздействиях и изменении нагрузки. При этом входным параметром для регулятора является один или несколько показателей работы объекта:
величина и знак отклонения управляемого параметра от заданного значения (рассогласование) Δφ = φ-φ0
производная (скорость рассогласования по времени)
 ,
,интеграл величины рассогласования во времени
.
 ,
, .
.В зависимости от того, как формируется управляющее воздействие, различают законы управления и соответствующие им регуляторы:
релейные, реализующие нелинейный двухпозиционный закон управления
пропорциональные (статические, или устройства с жесткой обратной связью)
интегральные (астатические, устройства без обратной связи)
пропорционально-интегральные, (изодромные, или устройства с исчезающей обратной связью)
пропорционально-дифференциальные (статические устройства с предварением)
пропорционально-интегрально-дифференциальные (изодромные устройства с предварением).
Применительно к установкам с ДВС релейный закон управления реализуется в системах регулирования давления и уровня, с помощью двухпозиционного реле включаются и отключаются насосы и компрессоры. Чтобы избежать слишком частых пусков и остановок механизмов устанавливается определенный интервал между значениями управляемого параметра, соответствующего включению и отключению реле (зона нечувствительности).
Остальные законы управления реализуются в основном в регуляторах скорости.
График регулирования по релейному закону представлен на рис. 23.

Рис.23
Пропорцинальные регуляторы вырабатывают управляющее воздействие в виде линейной зависимости от отклонения от отклонения регулируемого параметра:
ζ= -kpΔφ,
где kp– коэффициент усиления по регуляторному каналу.
Зависимость управляющего воздействия от отклонения регулируемого параметра показана на рис.24.

Рис.24
Так как в установившемся режиме определенной нагрузке должно соответствовать определенное положение регулирующего устройства, невозможно осуществлять регулирование во всем диапазоне нагрузок без определенной ошибки, называемой статизмом регулятора:

Интегральные регуляторы реализуют закон управляющего воздействия в виде формулы:
 ,
,
где Ти– время интегрирования.
Интегральный регулятор может использоваться как предельный выключатель, предохраняющий систему от выхода за установленные допустимые пределы отклонения регулируемой величины в случае возникновения неисправности.
Всережимные регуляторы должны обеспечивать изменение регулируемой величины во всем диапазоне задаваемых значений независимо от нагрузки. В сумматор поступает сигнал по измерительному каналу от фактического значения параметра и по каналу задающего устройства. Чтобы улучшить характеристики переходного процесса при изменении режима или при случайных воздействиях, в регулирующие устройства вводят интегральное или дифференциальное звено или оба этих звена, работающих поочередно.
В пропорционально-интегральных регуляторах управляющее воздействие описывается уравнением:
 ,
,
где первое слагаемое определяет пропорциональную часть, а второе – интегральную.
В пропорционально-дифференциальных регуляторах управляющее воздействие описывается уравнением:

где Тд– время дифференцирования.
Такие регуляторы позволяют временно увеличить величину управляющего воздействия и сократить время выхода на новый установившийся режим.
В пропорционально-дифференциальных-интегральных регуляторах управляющее воздействие описывается уравнением:

Такие регуляторы позволяют добиться наилучших показателей переходного процесса путем и добиться нулевого отклонения регулируемой величины от заданного значения во всем диапазоне нагрузок.
Все перечисленные виды регуляторов первоначально были реализованы в отечественной промышленности в виде приборов и агрегатов универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Недостатком этих приборов являлось наличие калиброванных отверстий и каналов малого диаметра, которые могли засоряться при некачественной подготовке рабочей среды (воздуха). В настоящее время применяются электронные регуляторы, в которых операции дифференцирования и интегрирования выполняются с помощью электронных схем и микропроцессоров.
Ранее существовали другие виды классификации регуляторов.
По способу энергетического воздействия измерительной части регулятора на его исполнительную часть регуляторы делятся на два класса: регуляторы прямого и непрямого действия. На рис.25 а показана блок-схема системы управления с регулятором прямого действия, на рис 25 б – с регулятором непрямого действия.
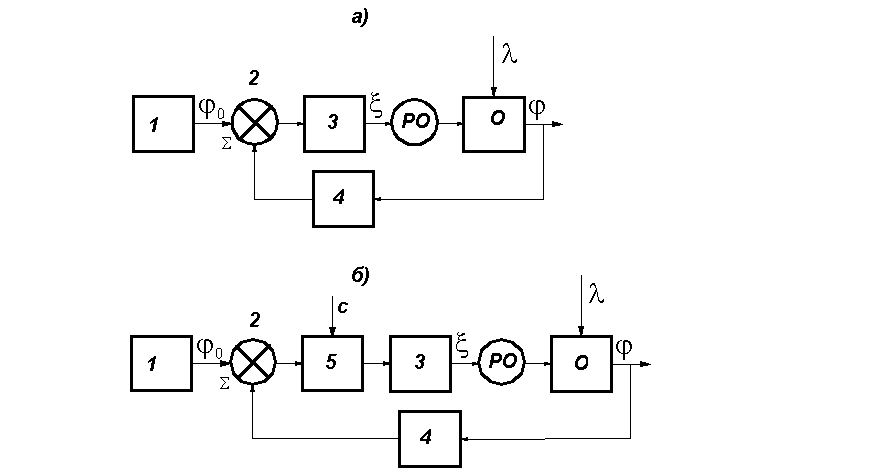
Рис. 25
1- элемент задания, 2 – элемент сравнения, 3 – исполнительный механизм, 4 – чувствительный элемент, 5 – усилитель, РО – регулирующий орган, О — объект
Регулятор прямого действия состоит из измерительного устройства, (включающего чувствительный элемент 4, элемент задания 1 и элемент сравнения 2), и исполнительного механизма 4, осуществляющего перестановку регулирующего органа в нужном направлении. Исполнительный механизм должен обладать вполне определенным выходным (или, как принято называть, перестановочным) усилием для перемещения РО. В регуляторе прямого действия необходимое перестановочное усилие вырабатывается чувствительным элементом.
В случае, когда нельзя спроектировать компактный чувствительный элемент, развивающий необходимое усилие, в конструкцию регулятора вводится усилитель 5, использующий дополнительную внешнюю энергию (с) для усиления мощности измерителя. Такой регулятор называется регулятором непрямого действия.
По способу обеспечения задачи регулирования регуляторы делились на следующие классы:
астатические регуляторы
статические регуляторы
программные регуляторы
двухпозиционные регуляторы.
На примерах простейших регуляторов давления можно понять отличие в конструкции статических и астатических регуляторов. На рис. 26 показан астатический регулятор давления.

Рис. 26 Астатический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – груз (элемент задания и элемент сравнения), 4 – передаточный рычаг (исполнительный механизм), 5 – шибер (регулирующий орган )
В потоке газа имеется регулирующее устройство 5 с изменяемым сопротивлением, благодаря которому при переменном давлении на подводе можно поддерживать постоянное давление в полости А. В равновесном режиме имеется баланс между подводом и отводом газа, давление в рабочей полости А соответствует расчетному значению Рри уравновешивается грузомG. При изменении нагрузки (отвода) баланс нарушается и в зависимости от характера наступившего изменения уменьшается или увеличивается давление в полости А. Поршень (чувствительный элемент начинает перемещаться, открывая или закрывая шибер. Когда вновь будет достигнуто исходное значение Рр, может наступить равновесие при новой нагрузке. Однако получить новое устойчивое равновесие без постоянных колебаний далеко не всегда удается. Это основной недостаток астатических регуляторов.
В статическом регуляторе (рис. 27) элементом задания является верхняя опора пружины 4, элементом сравнения является пружина 3. Величина усилия, действующая на поршень со стороны пружины, меняется в зависимости от положения поршня по высоте. Из-за этого возникает не одно, как в предыдущем случае, а множество равновесных состояний по давлению. Так, если давление Р начало возрастать, поршень, поднимаясь и сжимая пружину, может занять новое положение, при котором возросшему давлению будет отвечать возросшее усилие пружины. Таким образом, статический регулятор с заведомо предусмотренной статической ошибкой. Значение поддерживаемого параметра однозначно связано с величиной нагрузки.

Рис. 27 Статический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – пружина (элемент сравнения), 4 – верхняя опора пружины (элемент сравнения), 5 — передаточный рычаг (исполнительный механизм), 6 – шибер (регулирующий орган )
В программных регуляторах предусматривается дополнительный конструктивный элемент, изменяющий координату задания, а, следовательно, и регулируемую величину, по определенной функциональной зависимости от нагрузки, от времени или от других величин.
В двухпозиционных регуляторах реализуется релейный закон управления. Регуляторы этого типа работают по принципу включено – выключено.
III. Автоматические регуляторы — Студопедия.Нет
Качество АСР в значительной степени определяется тем, какие принципы реализованы в системе. Принцип регулирования определяет способ формирования управляющего воздействия в АСР.
Современные системы АР конструируются исходя из следующих трех принципов.
1 – регулирование по отклонению регулируемой величины от заданного значения (принцип Ползунова – Уатта или принцип регулирования по отклонению), регулирование по возмущению (по нагрузке), комбинированное регулирование.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: «устройство регулирования (черный ящик) обеспечивающие на своем выходе обратную связь регулируемого параметра, или его изменения, описываемую передаточной функцией типа П, ПИ и т.д……. «. При этом:
П, (P) — означает «пропорциональный»
И(I) — «интегральный»
Д(D) — «дифференциальный»
ПИ (PI) — «пропорциональный и интегральный»
ПД (PD) — «пропорциональный и дифференциальный»
ПИД (PID) — «пропорциональный, интегральный и дифференциальный»
Очень важное замечание — в подавляющем большинстве случаев эти регуляторы обеспечивают отрицательную обратную связьизменения регулируемого параметра на регулирующий параметр (воздействие).
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования.
Разработчиком могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов.
Для того, чтобы выбрать тип регулятора и определить его настройки необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования к качеству процесса регулирования.
3. Показатели качества регулирования для серийных регуляторов.
4. Характер возмущений, действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами. Замечу, что по требованиям технологического регламента многие объекты не допускают применения релейного управляющего воздействия.
Всего существует не так много типов регуляторов которые применяют для управления технологическими процессами всего их три, а именно П, ПИ, ПИД, есть и другие типы но их применение скорее исключение чем правило. Все регуляторы отличаются по своим характеристикам и сложности реализации. Коротко о плюсах, минусах и применении каждого из них:
П — пропорциональный регулятор.
Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект управления пропорционально величине ошибки.
П — регулятор — это регулятор, реализующий простейший пропорциональный закон регулирования.
У П –регулятора выходная величина в пределах зоны регулирования изменяется пропорционально изменению входной величины.
Уравнение динамики П –регулятора:
 y(60),
y(60),
где  – коэффициент передачи (пропорциональности) регулятора.
– коэффициент передачи (пропорциональности) регулятора.
У данного регулятора на выходе формируется управляющее воздействие пропорциональное сигналу ошибки:
 (61)
(61)
Или в операторном виде:
 (62)
(62)
Передаточная функция П –регулятора:
 (63)
(63)
С увеличением  статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения следует учитывать эти оба обстоятельства. Достоинство П –регуляторов — простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью. Недостаток П –регуляторов – установившаяся статическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения следует учитывать эти оба обстоятельства. Достоинство П –регуляторов — простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью. Недостаток П –регуляторов – установившаяся статическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
Параметром настройки П –регулятора является зона регулирования, или предел пропорциональности  , под которым понимают диапазон изменения входной величины регулятора, выраженный в процентах от максимального интервала, в пределах которого изменение входной величины приводит к изменению выходной величины регулятора от одного крайнего значения до другого.
, под которым понимают диапазон изменения входной величины регулятора, выраженный в процентах от максимального интервала, в пределах которого изменение входной величины приводит к изменению выходной величины регулятора от одного крайнего значения до другого.
Значение пределов пропорциональности может изменяться и устанавливаться в широких пределах, от двух до нескольких тысяч процентов. На рисунке 58 приведено семейство статических характеристик П –регулятора при разных значениях . При =100% изменению входной величины регулятора y на 1% диапазона ее изменения соответствует изменение выходной величины х на 1% диапазона ее изменения.
При крутой статической характеристике (  100%) пропорциональная зависимость между величинами x и y наблюдается только внутри границ предела пропорциональности. Значениям параметра за границами предела пропорциональности соответствуют либо максимальное, либо минимальное значения х. При =0% П –регулятор работает как двухпозиционный. Если
100%) пропорциональная зависимость между величинами x и y наблюдается только внутри границ предела пропорциональности. Значениям параметра за границами предела пропорциональности соответствуют либо максимальное, либо минимальное значения х. При =0% П –регулятор работает как двухпозиционный. Если  100% полное изменение входного сигнала приводит к частичному изменению величины х. Последняя не достигает ни одного крайнего значения. При
100% полное изменение входного сигнала приводит к частичному изменению величины х. Последняя не достигает ни одного крайнего значения. При  изменение входа y вообще не приводит к изменению выходной величины. Таким образом, степень влияния входной величины П –регулятора на выходную возрастает с уменьшением значения предела пропорциональности.
изменение входа y вообще не приводит к изменению выходной величины. Таким образом, степень влияния входной величины П –регулятора на выходную возрастает с уменьшением значения предела пропорциональности.
 (64)
(64)

Рисунок 58
В динамическом отношении П –регулятор представляет собой усилительное звено. Переходная характеристика П –регулятора определяется выражением:
 (65)
(65)
Вид переходной характеристики приведен на рисунке 59

Рисунок 59
Таким образом, П – регулятор просто усиливает сигнал ошибки в некоторое число раз. Важность П – регулятора определяется тем, что в САР, где он используется, изменяя его коэффициент усиления, можно не только добиться устойчивости САР, но и оптимизируя значение этого коэффициента оптимизировать и качество всей САР. Однако, получить требуемые или просто хорошие показатели качества САР с помощью одного только П — регулятора не удается.
Параметрами настройки П-регулятора являются коэффициент усиления Кр и рабочая точка Y0 (рисунок 60). Рабочая точка Y0 определяется как значение выходного сигнала, при котором рассогласование регулируемой величины равно нулю. При влиянии возмущающих воздействий возникает, в зависимости от Y0, отклонение регулирования.
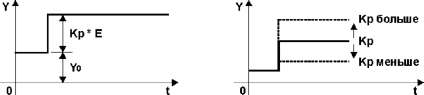
Рисунок 60
Чем больше Кр, тем круче статическая характеристика, тем меньше статическая погрешность (рисунок 61). При Кр=0 (линия 0) отклонение текущего значения параметра от заданного значения не вызывает никакого перемещения затвора регулирующего органа. Это равносильно отсутствию регулятора, и возмущение компенсировано быть не может. При Кр=∞ (линия 3) п-регулятор не давал бы статической погрешности (ε∞=0). Практически такой регулятор реализовать нельзя. Коэффициент усиления регулятора не должен превышать некоторого максимального допустимого значения.
Отсюда следует, что избавиться от недостатка, присущего пропорциональному закону – статической погрешности – принципиально невозможно. Можно уменьшить статическую ошибку регулирования, увеличивая Кр .
С увеличением Крстатическая ошибка (после отработки входного воздействия новое установившееся значение параметра всегда отличается от заданного) уменьшается. Однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения Кр следует учитывать оба обстоятельства.
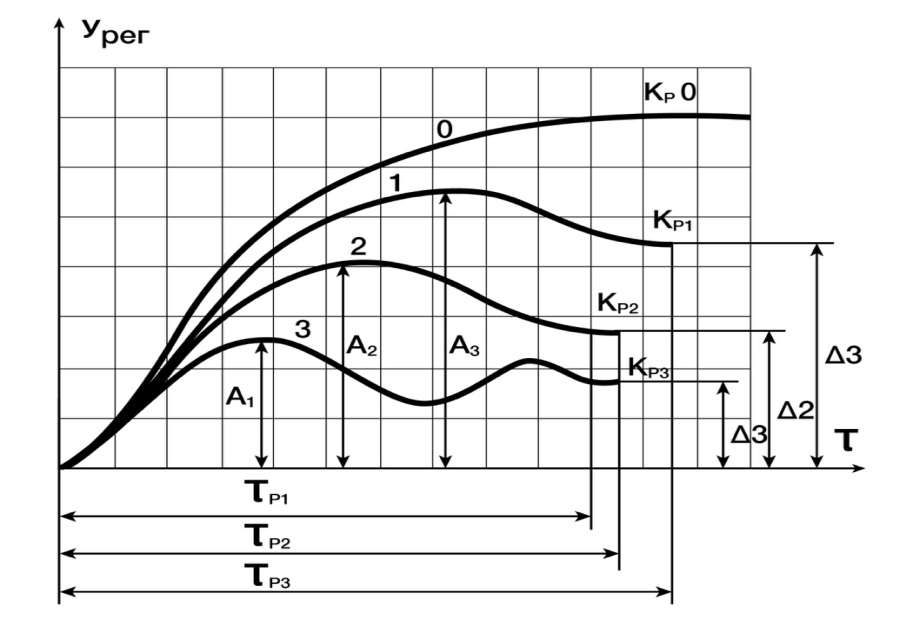
Рисунок 61
Статические характеристики: допустим, что для компенсации некоторого возмущающего воздействия требуется некоторое управляющее воздействие. Для его формирования П-регулятору необходимо, чтобы регулируемый параметр принял новое значение. Это значение должно отличаться от заданного, на некоторую величину — величину статической погрешности ε∞ (рисунок 62).

Рисунок 62
Пропорциональный регулятор воздействует на рабочий орган тем сильнее, чем больше отклонение регулируемого параметра от заданного значения.
Если на вход П -регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний.
П -регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая ошибка).
ДостоинствоП – регуляторов – простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью.
Недостаток – установившаяся статистическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
Интегральный закон регулирования (И -регулятор) — это регулирование, когда величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Рассмотрим пример:-если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а кто-то открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения), то это слагаемое даст дополнительное приращение мощности нагревателя.
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки регулирования
 (65),
(65),
где  – коэффициент передачи (усиления) И – регулятора;
– коэффициент передачи (усиления) И – регулятора;
 — постоянная времени интегрирования, которая является настроечным параметром.
— постоянная времени интегрирования, которая является настроечным параметром.
Постоянная времени интегрирования – это время, в течение которого с момента поступления на входе регулятора постоянного воздействия  =constсигнал на выходе регулятора достигнет значения, равного значению входного сигнала . С увеличением времени интегрирования воздействие входной величины регулятора на выходную ослабевает.
=constсигнал на выходе регулятора достигнет значения, равного значению входного сигнала . С увеличением времени интегрирования воздействие входной величины регулятора на выходную ослабевает.
И – регулятор имеет передаточную функцию:
 (66)
(66)
c управляющим воздействием пропорциональным интегралу сигнала ошибки
 =
=  (67)
(67)
Переходная характеристика И -регулятора имеет вид:
 (68)
(68)
Это уравнение наклонной прямой (68). Переходные характеристики при двух различных значениях времени интегрирования приведены на рисунке 63, из которого видно, что угол наклона не изменяется во времени. Для нахождения времени интегрирования по переходной характеристике, на поле чертежа наносят единичное ступенчатое изменение величины в том же масштабе. Координата точки пересечения этих характеристик по оси абсцисс определяет величину времени интегрирования.

Рисунок 63
Регуляторы с таким законом управления воздействуют на ОУ пропорционально интегралу от отклонения регулируемой величины. Тем самым устраняется статическая ошибка, свойственная П – регуляторам. Вместе с тем И – регуляторам присуща большая динамическая ошибка и невысокое быстродействие, особенно в начале переходного процесса: в начальный момент входного воздействия И – регулятор вследствие своих инерционных свойств не успевает выработать достаточный управляющий сигнал. С увеличением коэффициента передачи уменьшаются динамическая ошибка, время регулирования, но при этом уменьшается и устойчивость САУ.
И –регуляторы используют в тех случаях, когда условиями эксплуатации допускаются большие динамическая ошибка и время регулирования, и не допускается статическая ошибка. Их устанавливают на объектах с малым запаздыванием и плавным изменением возмущающих воздействий.
С технологической точки зрения И –регулятор формирует воздействие на рабочий орган, которое линейно возрастает или убывает до тех пор, пока регулируемый параметр не вернется к заданному значению. Эти регуляторы просты в реализации, но их нельзя применять на объектах без самовыравнивания, так как процесс регулирования носит колебательный характер и система может оказаться неустойчивой. Поскольку быстродействие И -регулятора невелико, самовыравнивание объекта должно быть значительным, запаздывание небольшим, а изменение нагрузок плавным.
ПИ — пропорционально-интегральный регуляторявляется одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это П-регулятор с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины.
ПИ –регулятор реализует закон регулирования, который записывается так:
 (69)
(69)
При отклонении регулируемой величины от заданного значения ПИ-регулятор сразу же изменяет управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения (пропорциональная составляющая), а потом постепенно увеличивает управляющее воздействие за счет интегральной составляющей. То есть он воздействует на ОУ пропорционально отклонению регулируемой величины и интегралу этого отклонения. ПИ –регулятор имеет передаточную функцию следующего вида:
 (70)
(70)
Как следует из формулы (69) ПИ –регулятор можно получить, если соединить параллельно два регулятора: пропорциональный, с передаточной функцией  и интегральный, с передаточной функцией
и интегральный, с передаточной функцией  (рисунок 64)
(рисунок 64)
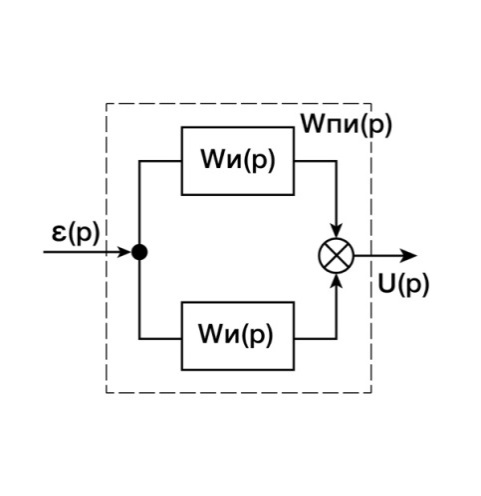
Рисунок 64
Управляющее воздействие можно записать исходя из того, что оно пропорционально как самому сигналу ошибки, так и его интегралу:
 (71)
(71)
Уравнение динамики ПИ –регулятора имеет вид:
 (72)
(72)
где – коэффициент передачи регулятора, а  – время интегрирования. Коэффициент передачи и время интегрирования являются параметрами настройки ПИ – регулятора. Пропорциональная составляющая настраивается с помощью предела пропорциональности , а интегральная – посредством изменения времени интегрирования. Воздействие входной величины на выходную повышается с уменьшением предела пропорциональности и уменьшением времени интегрирования. Переходная характеристика ПИ –регулятора описывается зависимостью:
– время интегрирования. Коэффициент передачи и время интегрирования являются параметрами настройки ПИ – регулятора. Пропорциональная составляющая настраивается с помощью предела пропорциональности , а интегральная – посредством изменения времени интегрирования. Воздействие входной величины на выходную повышается с уменьшением предела пропорциональности и уменьшением времени интегрирования. Переходная характеристика ПИ –регулятора описывается зависимостью:
 (73)
(73)
На рисунке 65 приведена переходная характеристика ПИ –регулятора.

Рисунок 65
ПИ –регулятор обладает преимуществами П – и И –регуляторов, т.е. быстро реагирует на изменение нагрузки (П – составляющая) и работает без статической ошибки (И – составляющая). В случае отказа канала регулирования с интегральной составляющей ПИ –регулятор будет работать как П –регулятор, что повышает надежность его работы. ПИ –регуляторы устанавливают на объекты со значительным запаздыванием при возмущающих воздействиях, изменяющихся с большой частотой в широких пределах.
Передаточная функция ПИ –регулятора представлена на рисунке 66

Рисунок 66
С технологической точки зрения ПИ –регулирование выглядит так: рабочий орган воспринимает суммарное воздействие, благодаря чему достигается высокое быстродействие, обеспечивается устойчивость регулирования и отсутствует статическая погрешность.
Промышленные ПИ –регуляторы обычно составляются в соответствии со структурными схемами, приведенными на рисунке 67, где в случае 67(а) схема содержит два параллельно соединенных звена:
усилительное и интегрирующее (графиком является 1 линия). Передаточная функция такой системы находится из равенства:
 (74)
(74)

Рисунок 67
Структурная схема, показанная на рисунке 67(б), состоящая из таких же звеньев, но с другим распределением сигнала (линия 2), учитывающим статическую и астатическую погрешность.
Плюсы:прост в реализации и настройке.
Минусы: выход на заданный параметр затянут.
Применяется во многих промышленных устройствах, где надо точно удерживать параметр, который не меняет свое значение мгновенно даже с мгновенным изменением внешней среды. Например температура не может измениться мгновенно, поскольку существует теплоемкость, к тому же сам датчик также не может моментально изменить свою температуру. Давление жидкостей тоже не может мгновенно изменится, поэтому применение ПИ регуляторов для удержания давления вполне оправданно.
Пропорционально-дифференциальный закон регулирования (ПД-регулятор). Качество регулирования можно повысить вводя в закон регулирования первую производную (скорость изменения) входной величины регулятора, т.е. Д-составляющую.
Уравнение динамики ПД –регулятора:
 (75)
(75)
где, – коэффициент передачи регулятора,  – время дифференцирования (отрезок времени, на который выходная величина опережает его пропорциональную составляющую при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора равен единице).
– время дифференцирования (отрезок времени, на который выходная величина опережает его пропорциональную составляющую при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора равен единице).
ПД –регулятор имеет два параметра настройки: предел пропорциональности и время дифференцирования . При наличии Д-составляющей выходная величина регулятора х изменяется с некоторым опережением относительно входной величины, пропорциональным скорости ее изменения.
При наличии в законе регулирования Д –составляющей регулятор реагирует и на изменения скорости входной величины, т.е. на интенсивность ее изменения. Такой регулятор вступает в работу быстрее, чем П –регулятор. Введение в закон регулирования воздействия по производной приводит к усилению влияния регулятора на переходный процесс, при этом сокращается время переходного процесса и уменьшаются колебания регулируемой величины. Переходная характеристика (рисунок 68) отличается от переходной характеристики П –регулятора большим изменением выходной величины сразу после изменения входной.
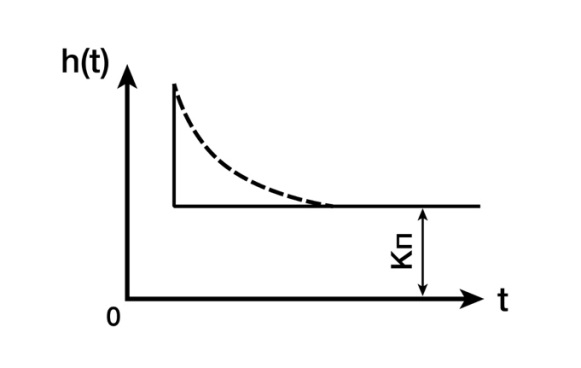
Рисунок 68
Передаточная функция:
 (76)
(76)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его производной, то:
 (77)
(77)
Регулятор вносит в систему опережение по фазе, изменяющееся от нуля при низких частотах и до +π/2 при высоких. Следовательно, Д-составляющая улучшает качество регулирования, уменьшая фазовое запаздывание САУ в целом на +π/2 рад. Благодаря этому при регулировании достигается эффект упреждения. ПД —регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих переходным запаздыванием (например: теплообменных и массообменных аппаратов), а так же в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро. Недостатком ПД –регулятора является невозможность обеспечения высокой точности регулирования.
ПИД — пропорционально-интегрально-дифференциальный регулятор.
ПИД-регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах.
По сути, данное устройство это эволюция ПИ-регулятора.
Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора).
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно. Это все стоит учитывать при выборе закона регулирования.
Уравнение динамики ПИД –регулятора:
 (78)
(78)
Так как ПИД-закон включает в себя три вида управляющих воздействий, то

Передаточная функция выглядит следующим образом:
 (79)
(79)
Коэффициенты  , входящие в передаточные функции типовых регуляторов подлежат настройке при наладке САУ и являются настроечными.
, входящие в передаточные функции типовых регуляторов подлежат настройке при наладке САУ и являются настроечными.
ПИД –регулятор имеет три параметра настройки: предел пропорциональности, время интегрирования и время дифференцирования. Воздействие входной величины этих регуляторов на выходную повышается с уменьшением предела пропорциональности, уменьшением времени интегрирования и увеличением времени дифференцирования.
На рисунке 69 показан принцип работы ПИД –регулятора.

Рисунок 69
В начальный момент времени ПИД регулятор оказывает на ОУ регулирующее воздействие пропорционально скорости изменения, которая затем уменьшается до значения, определяемого П –составляющей. После этого начинает влиять И –составляющая.. Таким образом ПИД –регулятор оказывает на ОУ регулирующее воздействие, которое позволяет ускорить процесс регулирования (рисунок 70).

Рисунок 70
ПИД –регулятор обладает еще одним положительным качеством – реакцией на скорость изменения нагрузки, что повышает качество технологического процесса. Такой регулятор устанавливают на объектах со скачкообразной, нечасто изменяющейся нагрузкой.
На рисунке 71 представлена передаточная функция ПИД –регулятора.

Рисунок 71
ПИД -регуляторы обеспечивают высокое качество регулирования объектов, обладающих переходным запаздыванием (например, теплообменных и массообменных аппаратов).
Плюсы:наилучшая переходная характеристика. Отличная скорость и точность регулирования.
Минусы:сложен в реализации и настройке ,современные ПИД регуляторы реализовываются с применением вычислительных процессоров; выход на заданный параметр затянут.

Рисунок 72
Релейное регулирование
Релейные системы автоматического регулирования относятся к категории систем регулирования прерывистого действия. По своему принципу действия релейные системы вследствие нелинейной характеристики релейных элементов являются нелинейными системами. В релейных системах замыкание и размыкание цепи регулирования происходит в зависимости от значения регулируемой величины. Эти моменты времени заранее не известны и поэтому не могут быть заданы извне.
Релейные системы автоматического регулирования можно разделить на релейные астатические и позиционные. В астатических прерывистых релейных системах контур обратной связи периодически замыкается и размыкается с помощью реле. Позиционные регуляторы обеспечивают перемещение регулирующего органа в одно из фиксированных положений или позиций. По количеству возможных позиций различают двух-, трех-, и многопозиционные . Автоматические регуляторы, у которых при непрерывном изменении входной величины регулирующий орган занимает ограниченное число определенных, заранее известных, положений называютсяпозиционными.Входной величиной позиционного регулятора является рассогласование ε между заданным узд и текущим у значениями регулируемой величины (ε= узд-у). Выходной величиной является управляющее воздействие.
Наиболее часто употребляются регуляторы с релейной статической характеристикой: двухпозиционный и трехпозиционный.
Законы управления. Типовые регуляторы — Студопедия
Закон управления — это алгоритм или функциональная зависимость, в соответствии с которыми регулятор формирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде
u(t) = F(x, g, f), (8.1)
где F — некоторый оператор от отклонения x, задающего воздействия g и возмущающего воздействия f, а также от их производных и интегралов по времени.
Обычно выражение (8.1) может быть записано следующим образом:
u(t) = F1(x) + F2(g) + F3(f). (8.2)
Здесь первое слагаемое соответствует управлению по отклонению, второе и третье — управлению по внешнему воздействию.
В зависимости от вида оператора F законы управления делятся на стандартные и специальные.
Стандартные законы управления — это универсальные законы, с помощью которых можно решать задачи автоматизации разнообразных технологических процессов и объектов.
Специальные законы управления — это законы, формируемые для решения конкретных задач.
Если для формирования управляющего воздействия u(t) используются только линейные математические операции, то такой закон управления называется линейным, в противном случае — нелинейным.
Линейный стандартный закон управления имеет следующий вид:
 , (8.3)
, (8.3)
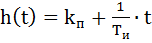
где первое слагаемое является пропорциональной, второе — интегральной, третье — дифференциальной составляющими закона, а коэффициенты kП, kИ и kД определяют вклад каждой из составляющих в формируемое управляющее воздействие.
Интегральная составляющая закона управления вводится для повышения точности, а дифференциальная — для повышения быстродействия работы системы.
Регулятор, формирующий управляющее воздействие в соответствии с (8.3), имеет передаточную функцию
 . (8.4)
. (8.4)
Структурная схема линейного стандартного регулятора приведена на рис.8.1.
Настройка такого регулятора заключается в задании значений коэффициентов kП, kИ, kД таким образом, чтобы удовлетворить требованиям качества управления в соответствии с выбранными критериями качества.

Рис. 8.1. Структура линейного стандартного регулятора
На практике широкое распространение получили типовые или промышленные регуляторы, представляющие собой универсальные автоматические устройства, легко приспосабливаемые для автоматизации разнообразных технологических процессов и объектов. При этом объект управления, как правило, является звеном статического типа, т.е. WОУ(0)=kОУ, где kОУ — коэффициент передачи объекта управления. Типовые регуляторы реализуют типовые законы управления, являющиеся частными случаями линейного стандартного закона управления, и классифицируются следующим образом.
П-регуляторы. Реализуют П-закон или пропорциональный закон управления
u(t) = kП x(t).
Передаточная функция П-регулятора
WR(s) = kП.
Пропорциональное управление позволяет уменьшить установившуюся ошибку в объекте в (1+k) раз, где k = kП´kОУ — коэффициент передачи разомкнутой системы. Регулирование в этом случае получается статическим, так как при любом конечном значении коэффициента передачи разомкнутой системы установившаяся ошибка будет отличной от нуля.
И-регуляторы. Реализуют И-закон или интегральный закон управления
u(t) = 
 .
.
Передаточная функция И-регулятора
 .
.
При интегральном управлении получается система, астатическая по отношению к задающему воздействию. Повышение степени астатизма приводит к увеличению установившейся точности системы, но одновременно снижает ее быстродействие, а также приводит к ухудшению устойчивости. Снижение быстродействия объясняется тем, что в первый момент времени при появлении ошибки управляющее воздействие равняется нулю и только затем начинается его рост. В системе пропорционального управления рост управляющего воздействия в первые моменты времени происходит более интенсивно, так как наличие ошибки сразу дает появление управляющего воздействия, в то время как в системе интегрального управления должно пройти некоторое время.
ПИ-регуляторы. Реализуют ПИ-закон или пропорционально-интегральный закон управления
u(t) = kП x(t) + .
Передаточная функция ПИ-регулятора

 ,
,
где TИ = kП/ kИ.
Пропорционально-интегральное (изодромное) управление сочетает в себе высокую точность интегрального управления (астатизм) с большим быстродействием пропорционального управления. В первые моменты времени при появлении ошибки система с ПИ-регулятором работает как система пропорционального регулирования, а в дальнейшем начинает работать как система интегрального управления.
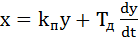
ПД-регуляторы. Реализуют ПД-закон или пропорционально-диф-ференциальный закон управления
 .
.
Передаточная функция ПД-регулятора
 = kП(TДs + 1),
= kП(TДs + 1),
где TД = kД/ kП.
Пропорционально-дифференциальное управление применяются для повышения быстродействия работы системы.
Регулирование по производной не имеет самостоятельного значения, так как в установившемся состоянии производная от ошибки равна нулю и управление прекращается. Однако она играет большую роль в переходных процессах, потому что позволяет учитывать тенденцию к росту или уменьшению ошибки. В результате увеличивается скорость реакции системы, повышается быстродействие, снижается ошибка в динамике.
ПИД-регуляторы. Реализуют ПИД-закон или пропорционально-интегрально-дифференциальный закон управления, соответствующий линейному стандартному закону вида (8.3).
ПИД-регулятор, представляющий собой астатический изодромный регулятор с предвидением, обеспечивает повышенную точность и повышенное быстродействие системы.
В общем случае закон управления может иметь сложный вид.
Глава 16. Типы регуляторов
1. Классификация автоматических регуляторов
Основная функция регулятора состоит в том, чтобы выявить отклонение регулируемой величины от заданного значения, усилить это отклонение и преобразовать в перемещение исполнительного механизма или в управляющий сигнал регулирующего органа. Иными словами, автоматический регулятор – это комплекс устройств, предназначенных для измерения регулируемой величины, сопоставления ее с заданной и оказания регулирующего воздействия на процесс для устранения выявленного отклонения. Каждую из перечисленных функций выполняет определенная часть регулятора, который состоит из следующих узлов: чувствительного (измерительного) элемента, управляющего устройства с задатчиком, исполнительного механизма и регулирующего органа.
В литейных и термических цехах для автоматизации различных технологических процессов используют множество регуляторов, различающихся разнообразными признаками и конструкцией. Наиболее целесообразно классифицировать регуляторы по таким признакам, которые отражают и их конструктивные особенности. Эти классификации позволяют выявить также стороны регуляторов, которые трудно усмотреть в общей классификации, изложенной в гл. 1.
Регуляторы могут быть классифицированы по способу действия, по виду вспомогательной энергии и т. п.
Согласно первой классификации различают регуляторы прямого и косвенного (непрямого) действия. В регуляторах прямого действия измерительный элемент непосредственно воздействует на регулирующий орган. Эти регуляторы просты по устройству и надежны в работе, однако они обладают рядом недостатков: большая зона нечувствительности, малые пределы регулирования и невозможность дистанционного управления. В регуляторах косвенного действия регулирующий орган перемещается за счет энергии, получаемой от постороннего источника.
По виду вспомогательной энергии регуляторы косвенного действия подразделяются на гидравлические, пневматические, электрические и комбинированные. Гидравлические регуляторы обеспечивают плавное регулирование в широком диапазоне и создают большие усилия на регулирующий орган. Они надежны и удобны в эксплуатации, но имеют ограниченный радиус действия, определяемый длиной гидравлического трубопровода. Пневматические регуляторы обладают рядом положительных качеств, свойственных гидравлическим. Однако они сравнительно легко засоряются и поэтому требуют применения дополнительных воздушных фильтров. Характеристики пневматических регуляторов зависят от температуры и давления окружающей среды. Электрические регуляторы имеют практически неограниченный радиус действия, их работа мало зависит от температуры и давления окружающей среды. При конструировании комбинированных регуляторов стремятся использовать положительные характеристики каждого вида вспомогательной энергии.
По роду действия, т. е. по виду управляющего воздействия на регулирующий орган, различают регуляторы непрерывного и прерывистого (дискретного) действия. В регуляторах непрерывного действия регулирующий сигнал подается на исполнительный механизм непрерывно при наличии отклонения регулируемой величины от заданного значения. В регуляторах прерывистого (дискретного) действия регулирующий сигнал подается на исполнительный механизм через определенные интервалы времени. В паузах регулятор как бы оценивает произведенное им воздействие на регулируемый объект и формирует новый регулирующий сигнал с учетом произведенного воздействия.
По виду регулируемой величины различают регуляторы температуры, давления, расхода, уровня и т. д.
По конструктивному исполнению регуляторы могут быть приборными, аппаратными и агрегатными. Приборные регуляторы содержат измерительное устройство, которое одновременно выдает сигнал на измерительный прибор, регистрирующий значение контролируемой величины, и сигнал управления. К приборным регуляторам относятся электронные потенциометры, автоматические мосты, логометры и т. п. В регуляторах аппаратного типа вырабатывается только управляющий сигнал. В состав таких регуляторов входят измерительный блок и электронное устройство, формирующие законы регулирования. В регуляторах агрегатного типа преобразовательно-усилительный блок сравнивает сигналы первичного преобразователя и задатчика и формирует выходной сигнал.
Различные типы регуляторов напряжения и принцип работы
Регулятор напряжения используется для регулирования уровней напряжения. Когда требуется стабильное и надежное напряжение, предпочтительным устройством является регулятор напряжения. Он генерирует фиксированное выходное напряжение, которое остается постоянным при любых изменениях входного напряжения или условий нагрузки. Он действует как буфер для защиты компонентов от повреждений. Регулятор напряжения — это устройство с простой конструкцией с прямой связью, в котором используются контуры управления с отрицательной обратной связью.В основном существует два типа регуляторов напряжения: линейные регуляторы напряжения и импульсные регуляторы напряжения; они используются в более широких приложениях. Линейный регулятор напряжения — самый простой тип регулятора напряжения. Он доступен в двух типах, которые являются компактными и используются в системах с низким энергопотреблением и низким напряжением. Обсудим различные типы регуляторов напряжения.
 Регулятор напряжения
Регулятор напряженияТипы регуляторов напряжения и принцип их работы
В основном существует два типа регуляторов напряжения: линейный регулятор напряжения и импульсный регулятор напряжения.
- Существует два типа линейных регуляторов напряжения: последовательные и шунтовые.
- Существует три типа импульсных регуляторов напряжения: повышающие, понижающие и инверторные регуляторы напряжения.
Линейный регулятор
Линейный регулятор действует как делитель напряжения. В омической области используется полевой транзистор. Сопротивление регулятора напряжения меняется в зависимости от нагрузки, что приводит к постоянному выходному напряжению.
Преимущества линейного регулятора напряжения
- Обеспечивает низкую пульсацию выходного напряжения
- Быстрое время отклика на нагрузку или изменение линии
- Низкие электромагнитные помехи и меньший шум
Недостатки линейного регулятора напряжения
- КПД очень низкий
- Требуется большое пространство — необходим радиатор
- Напряжение выше входа не может быть увеличено
В последовательном регуляторе напряжения используется регулируемый элемент, последовательно включенный с нагрузкой.Изменяя сопротивление этого последовательного элемента, можно изменить падение напряжения на нем. И напряжение на нагрузке остается постоянным.
 Регулятор напряжения серии
Регулятор напряжения серии Количество потребляемого тока эффективно используется нагрузкой; в этом главное преимущество последовательного регулятора напряжения. Даже когда нагрузка не требует тока, последовательный регулятор не потребляет полный ток. Следовательно, последовательный регулятор значительно эффективнее шунтирующего регулятора напряжения.
 Цепь регулятора напряжения серии Цепь регулятора напряжения серии
Цепь регулятора напряжения серии Цепь регулятора напряжения серииШунтирующий регулятор напряжения
Шунтирующий регулятор напряжения работает, обеспечивая путь от напряжения питания к земле через переменное сопротивление. Ток через шунтирующий регулятор отклоняется от нагрузки и бесполезно течет на землю, что делает эту форму, как правило, менее эффективной, чем последовательный регулятор. Это, однако, более простое, иногда состоящее только из напряжения опорного диода, и используется в очень маломощных схемах, в котором впустую ток слишком мал, чтобы быть озабоченность.Эта форма очень часто для эталонного напряжения цепей. Шунтирующий регулятор обычно может только поглощать (поглощать) ток.
 Шунтирующий регулятор напряжения
Шунтирующий регулятор напряженияПрименение шунтирующих регуляторов
Шунтирующие регуляторы используются в:
- Импульсные источники питания с низким выходным напряжением
- Цепи источника и стока тока
- Усилители ошибки
- Регулируемое напряжение или ток, линейный и коммутируемый Источники питания
- Мониторинг напряжения
- Аналоговые и цифровые схемы, требующие точных ссылок
- Прецизионные ограничители тока
Импульсный регулятор напряжения
Импульсный регулятор быстро включает и выключает последовательные устройства.Рабочий цикл переключателя устанавливает количество заряда, передаваемого нагрузке. Это контролируется механизмом обратной связи, аналогичным линейному регулятору. Импульсные регуляторы эффективны, потому что последовательный элемент либо полностью проводит ток, либо выключен, потому что он почти не рассеивает мощность. Импульсные регуляторы способны генерировать выходное напряжение, превышающее входное напряжение, или противоположную полярность, в отличие от линейных регуляторов.
 Импульсный регулятор напряжения
Импульсный регулятор напряженияИмпульсный регулятор напряжения быстро включается и выключается для изменения выхода.Он требует управляющего генератора, а также заряжает компоненты накопителя.
В импульсном регуляторе с частотно-импульсной модуляцией изменяются частота, постоянный рабочий цикл и спектр шума, налагаемые PRM, изменяются; отфильтровать этот шум труднее.
Импульсный стабилизатор с широтно-импульсной модуляцией, постоянной частотой, изменяющимся рабочим циклом, эффективен и легко отфильтровывает шум.
В импульсном регуляторе ток в непрерывном режиме через катушку индуктивности никогда не падает до нуля.Это обеспечивает максимальную выходную мощность. Это дает лучшую производительность.
В импульсном регуляторе ток в прерывистом режиме через катушку индуктивности падает до нуля. Это дает лучшую производительность при низком выходном токе.
Топологии коммутации
Имеет два типа топологий: диэлектрическая изоляция и неизолированная.
Без изоляции: Это основано на небольших изменениях в Vout / Vin. Примеры: повышающий регулятор напряжения (Boost) — повышает входное напряжение; Step Down (Buck) — снижает входное напряжение; Повышение / Понижение (повышение / понижение) Регулятор напряжения — понижает, повышает или инвертирует входное напряжение в зависимости от контроллера; Зарядный насос — обеспечивает многократный ввод без использования индуктора.
Диэлектрик — Изоляция: Основано на радиации и интенсивных средах.
Преимущества коммутационных топологий
Основными преимуществами импульсного источника питания являются эффективность, размер и вес. Это также более сложная конструкция, способная обеспечить более высокую энергоэффективность. Импульсный регулятор напряжения может обеспечивать выходной сигнал, который больше или меньше, или инвертирует входное напряжение.
Недостатки топологий коммутации
- Более высокое пульсирующее напряжение на выходе
- Более медленное время восстановления переходного процесса
- EMI производит очень шумный выходной сигнал
- Очень дорогой
Повышающий регулятор напряжения
Повышающие переключающие преобразователи также так называемые повышающие импульсные регуляторы, обеспечивают более высокое выходное напряжение за счет увеличения входного напряжения.Выходное напряжение регулируется до тех пор, пока потребляемая мощность находится в пределах выходной мощности схемы. Для управления гирляндой светодиодов используется повышающий импульсный регулятор напряжения.
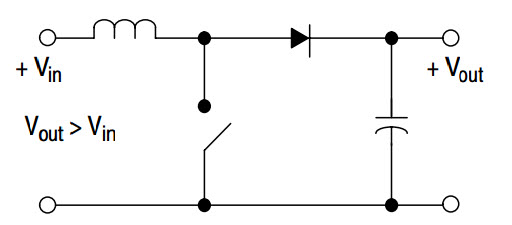
Повышающий регулятор напряжения
Предположим, что схема без потерь Pin = Pout (входная и выходная мощности одинаковы)
Тогда V на входе I на входе = V на выходе I out ,
I out / I in = (1-D)
Из этого следует, что в этой цепи
- мощности остаются прежними
- Напряжение увеличивается
- Ток уменьшается
- Эквивалентно трансформатору постоянного тока
Step Down ( Бак) Регулятор напряжения
Понижает входное напряжение.
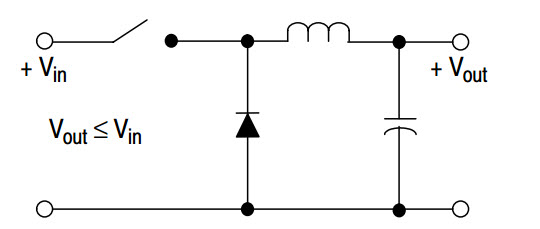 Понижающий регулятор напряжения
Понижающий регулятор напряженияЕсли входная мощность равна выходной мощности, то
P вход = P выход ; V вход I вход = V выход I выход ,
I выход / I вход = V вход / V выход = 1 / D
Понижающий преобразователь эквивалентен к трансформатору постоянного тока, в котором коэффициент трансформации находится в диапазоне 0-1.
Повышение / Понижение (Повышение / Понижение)
Его также называют инвертором напряжения.Используя эту конфигурацию, можно повышать, понижать или инвертировать напряжение в соответствии с требованиями.
- Выходное напряжение имеет полярность, противоположную входной.
- Это достигается за счет прямого смещения диода VL с обратным смещением во время выключения, вырабатывающего ток и зарядки конденсатора для выработки напряжения во время выключения.
- Используя этот тип импульсного регулятора, можно достичь эффективности 90%.
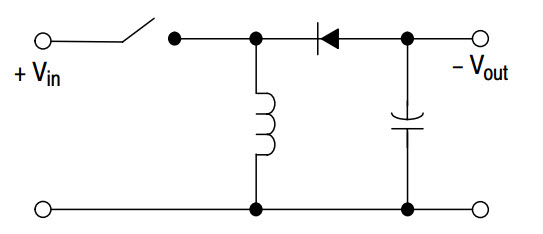 Повышающий / понижающий регулятор напряжения
Повышающий / понижающий регулятор напряженияРегулятор напряжения генератора
Генераторы переменного тока вырабатывают ток, необходимый для удовлетворения электрических требований транспортного средства при работе двигателя.Он также восполняет энергию, которая используется для запуска автомобиля. Генератор имеет способность производить больше тока на более низких скоростях, чем генераторы постоянного тока, которые когда-то использовались в большинстве транспортных средств. Генератор состоит из двух частей.
 Регулятор напряжения генератора
Регулятор напряжения генератора Статор — это неподвижный компонент, который не движется. Он содержит набор электрических проводников, намотанных катушками на железный сердечник.
Ротор / Якорь — Это движущийся компонент, который создает вращающееся магнитное поле любым из следующих трех способов: (i) индукцией (ii) постоянными магнитами (iii) с помощью возбудителя.
Электронный регулятор напряжения
Простой регулятор напряжения может быть изготовлен из резистора, соединенного последовательно с диодом (или рядами диодов). Из-за логарифмической формы кривых V-I на диоде напряжение на диоде изменяется незначительно из-за изменений потребляемого тока или изменений на входе. Когда точный контроль напряжения и эффективность не важны, эта конструкция может работать нормально.
 Электронный регулятор напряжения
Электронный регулятор напряженияТранзисторный регулятор напряжения
Электронные регуляторы напряжения имеют нестабильный источник опорного напряжения, который обеспечивается диодом Зенера, который также известен как обратный пробой рабочего напряжения диода.Он поддерживает постоянное выходное напряжение постоянного тока. Пульсации переменного напряжения заблокированы, но фильтр не может быть заблокирован. Регулятор напряжения также имеет дополнительную схему для защиты от короткого замыкания и схему ограничения тока, защиту от перенапряжения и тепловое отключение.
 Транзисторный регулятор напряжения
Транзисторный регулятор напряженияРечь идет о различных типах регуляторов напряжения и принципах их работы. Мы считаем, что информация, представленная в этой статье, поможет вам лучше понять эту концепцию.Кроме того, по любым вопросам, касающимся этой статьи или любой помощи в реализации проектов в области электротехники и электроники, вы можете обратиться к нам, оставив комментарий в разделе комментариев ниже. Вот вам вопрос — где мы будем использовать регулятор напряжения генератора?
Фото:
.Что такое стабилизатор статического напряжения? Определение и типы
Определение: Регулятор, не имеющий вращающихся частей, такой тип регулятора называется статическим регулятором напряжения. Их схема состоит из таких устройств, как трансформаторы, конденсаторы, резисторы, транзисторы, магнитные усилители и т. Д. Такой тип регуляторов не имеет потерь на трение и износ (поскольку не имеет вращающихся частей). Не требует постоянного внимания, что снижает стоимость системы на
.Типы стабилизаторов статического напряжения
Статический регулятор напряжения превосходит электромеханические регуляторы в отношении точности управления, реакции, надежности и обслуживания.Регуляторы статического напряжения в основном делятся на два типа. Они есть;
- Регулятор напряжения серво типа
- Регулятор магнитного усилителя
Типы статических регуляторов напряжения подробно описаны ниже;
1. Регулятор напряжения серво типа
Основной особенностью регулятора напряжения серво типа является использование амплидина. Амплидин — это разновидность электромеханического усилителя, усиливающего сигнал. Система содержит главный возбудитель, приводимый в действие валом генератора, и вспомогательный возбудитель, обмотка возбуждения которого управляется амплидином.
Вспомогательный возбудитель и амплидин приводятся в действие двигателем постоянного тока, подключенным к обеим машинам. Главный возбудитель имеет насыщенный магнитный контур и, следовательно, имеет грубое выходное напряжение. Якорь главного и вспомогательного возбудителя соединены последовательно, и эта последовательная комбинация возбуждает обмотку возбуждения генератора.
Работа регулятора напряжения серво типа
Трансформатор напряжения выдает сигнал, пропорциональный выходному сигналу генератора переменного тока.Выходные клеммы генератора подключены к электронному усилителю. Когда происходит отклонение выходного напряжения генератора переменного тока, электронный усилитель передает напряжение на амплидин. Выход амплидина подает напряжение в управляющее поле амплидина и, следовательно, изменяет поле вспомогательного возбудителя. Таким образом, вспомогательный и основной возбудитель последовательно регулируют ток возбуждения генератора.
2. Регулятор магнитного усилителя
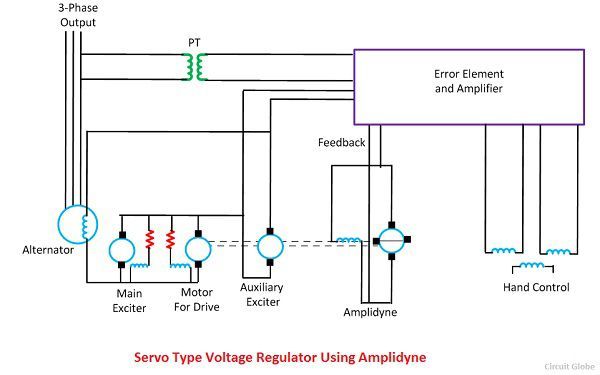 2. Регулятор магнитного усилителя
2. Регулятор магнитного усилителя Основным элементом магнитных усилителей является катушка со стальным сердечником с дополнительной обмоткой, запитываемой постоянным током.Дополнительная обмотка используется для управления переменным током относительно большой мощности с использованием постоянного тока малой мощности. Стальной сердечник регулятора состоит из двух идентичных обмоток переменного тока, также называемых нагрузочной обмоткой. Обмотки переменного тока подключаются последовательно или параллельно и последовательно с ними находится нагрузка.
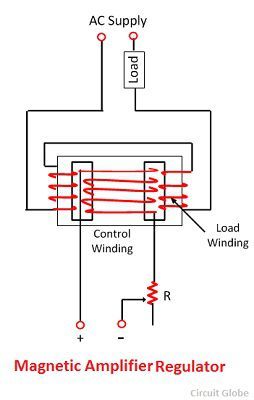 Последовательная обмотка используется, когда требуется короткое время отклика и высокое напряжение, тогда как параллельная обмотка используется для медленного отклика. Обмотка управления запитана постоянным током.Когда в обмотке нагрузки нет тока, то обмотка переменного тока имеет самый высокий потенциал и индуктивность по отношению к потенциалу переменного тока. Из-за этого переменный ток к нагрузке ограничен низким значением индуктивного реактивного сопротивления, а напряжение нагрузки невелико.
Последовательная обмотка используется, когда требуется короткое время отклика и высокое напряжение, тогда как параллельная обмотка используется для медленного отклика. Обмотка управления запитана постоянным током.Когда в обмотке нагрузки нет тока, то обмотка переменного тока имеет самый высокий потенциал и индуктивность по отношению к потенциалу переменного тока. Из-за этого переменный ток к нагрузке ограничен низким значением индуктивного реактивного сопротивления, а напряжение нагрузки невелико.
При приложении постоянного напряжения магнитный поток постоянного тока проходит через сердечник, и сердечник приближается к магнитному насыщению. Это снижает индуктивность и сопротивление обмоток переменного тока. Переменный ток через обмотку возбуждения увеличивается по мере увеличения потока постоянного тока через обмотку управления.Таким образом, изменение величины тока нагрузки в небольшом диапазоне заставляет напряжение нагрузки изменяться в широком диапазоне.
,Строительные, рабочие и проектные типы
Так же, как ситуации, в которых нам нужно регулировать напряжение в наших конструкциях, существуют сценарии, в которых нам нужно регулировать ток, который подается в определенную часть нашей цепи. В отличие от преобразования (переход от одного уровня напряжения к другому), которое обычно является одной из основных причин регулирования напряжения, регулирование тока обычно заключается в поддержании постоянного тока, который подается, независимо от изменений сопротивления нагрузки или входного напряжения.Цепи (встроенные или нет), которые используются для обеспечения постоянного тока , называются (постоянными) регуляторами тока , и они очень часто используются в силовой электронике.
Хотя регуляторы тока использовались в нескольких приложениях на протяжении многих лет, возможно, до недавнего времени они не были одной из самых популярных тем в обсуждениях проектирования электроники. Текущие регуляторы теперь достигли своего рода повсеместного статуса благодаря их важным приложениям в светодиодном освещении среди других приложений.
В сегодняшней статье мы рассмотрим эти регуляторы тока и исследуем лежащие в их основе принципы работы, их конструкцию, типы и области применения, среди прочего .
Принцип действия регулятора тока
Работа регулятора тока аналогична работе регулятора напряжения с основным отличием в параметре, который они регулируют, и величине, которую они изменяют для обеспечения своего выхода. В регуляторах напряжения ток варьируется для достижения необходимого уровня напряжения, в то время как регуляторы тока обычно включают изменения напряжения / сопротивления для достижения требуемого выходного тока.Таким образом, хотя это возможно, обычно трудно одновременно регулировать напряжение и ток в цепи.
Чтобы понять, как работают регуляторы тока, необходимо быстро взглянуть на закон Ома;
В = ИК или I = В / П
Это означает, что для поддержания постоянного тока на выходе эти два свойства (напряжение и сопротивление) должны поддерживаться постоянными в цепи или настраиваться таким образом, чтобы при изменении одного значения другого соответственно регулировалось для сохранения такой же выходной ток.Таким образом, регулирование тока включает в себя регулировку напряжения или сопротивления в цепи или обеспечение неизменности значений сопротивления и напряжения независимо от требований / воздействий подключенной нагрузки.
Рабочий регулятор тока
Чтобы правильно описать, как работает регулятор тока, рассмотрим приведенную ниже принципиальную схему.
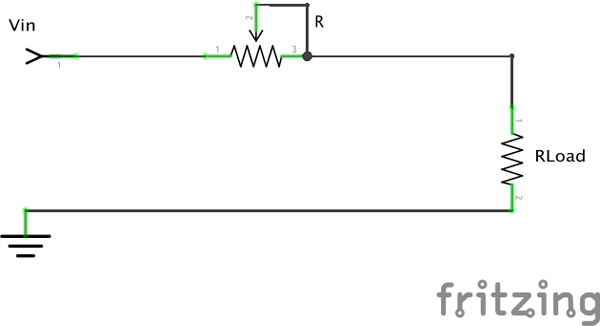
Переменный резистор в приведенной выше схеме используется для обозначения действия регулятора тока.Предположим, что переменный резистор автоматизирован и может автоматически регулировать собственное сопротивление. Когда на схему подается питание, переменный резистор регулирует свое сопротивление, чтобы компенсировать изменения тока из-за изменения сопротивления нагрузки или напряжения питания. Относительно базового класса электричества вы должны помнить, что при увеличении нагрузки, которая по сути является сопротивлением (+ емкость / индуктивность), происходит эффективное падение тока и наоборот. Таким образом, когда нагрузка в цепи увеличивается (увеличение сопротивления), а не падение тока, переменный резистор уменьшает свое собственное сопротивление, чтобы компенсировать повышенное сопротивление и обеспечить одинаковые токи.Таким же образом, когда сопротивление нагрузки уменьшается, переменное сопротивление увеличивает свое собственное сопротивление, чтобы компенсировать уменьшение, таким образом поддерживая значение выходного тока.
Другой подход к регулированию тока состоит в том, чтобы подключить достаточно высокий резистор параллельно нагрузке так, чтобы в соответствии с законами основного электричества ток протекал по пути с наименьшим сопротивлением, который в этом случае будет проходить через нагрузку, с только «незначительное» количество тока, протекающего через резистор высокого номинала.
Эти изменения также влияют на напряжение, так как некоторые регуляторы тока поддерживают ток на выходе, изменяя напряжение. Таким образом, практически невозможно регулировать напряжение на том же выходе, на котором регулируется ток.
Конструкция регуляторов тока
Регуляторы токаобычно реализуются с использованием стабилизаторов напряжения на основе микросхем, таких как MAX1818 и LM317, или с использованием пассивных и активных компонентов, таких как транзисторы и стабилитроны.
Проектирование регуляторов тока с использованием регуляторов напряжения
Для проектирования регуляторов тока с использованием регулятора напряжения на основе микросхемы, метод обычно включает настройку регуляторов напряжения с постоянным сопротивлением нагрузки, и обычно используются линейные регуляторы напряжения, поскольку напряжение между выходом линейных регуляторов и их землей обычно составляет Таким образом, жестко регулируемый, фиксированный резистор может быть вставлен между выводами, так что фиксированный ток течет к нагрузке.Хороший пример дизайна, основанного на этом, был опубликован Budge Ing в одной из публикаций EDN в 2016 году.
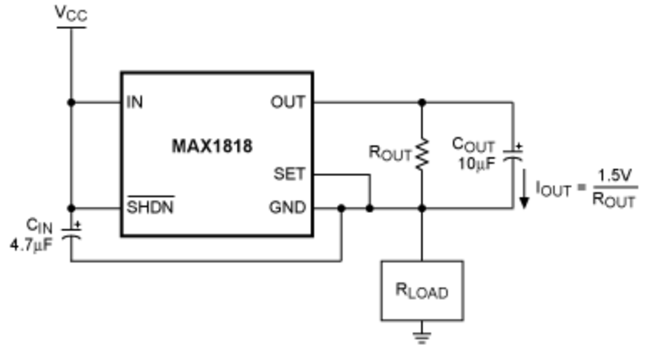
Используемая схема использует линейный стабилизатор LDO MAX1818 для создания стабилизированного источника постоянного тока на стороне высокого напряжения. Источник питания (показанный на изображении выше) был разработан таким образом, что он питает RLOAD постоянным током, который равен I = 1,5 В / ROUT. Где 1,5 В — предустановленное выходное напряжение MAX1818 , но его можно изменить с помощью внешнего резистивного делителя.
Для обеспечения оптимальной производительности конструкции напряжение на входной клемме MAX1818 должно быть до 2,5 В, а не выше 5,5 В, поскольку это рабочий диапазон, указанный в техническом паспорте. Чтобы удовлетворить это условие, выберите значение ROUT, которое позволяет от 2,5 В до 5,5 В между IN и GND. Например, при нагрузке, скажем, 100 Ом с 5 В VCC, устройство правильно работает с ROUT выше 60 Ом, поскольку это значение допускает максимальный программируемый ток 1,5 В / 60 Ом = 25 мА. Тогда напряжение на устройстве будет равно минимально допустимому: 5 В — (25 мА × 100 Ом) = 2.5V.
Другие линейные регуляторы, такие как LM317, также могут использоваться в аналогичном процессе проектирования, но одно из основных преимуществ , которые имеют микросхемы типа MAX1818 по сравнению с другими, заключается в том, что они включают тепловое отключение, которое может быть очень важным в текущем регламенте , поскольку температура микросхемы имеет тенденцию к нагреванию при подключении нагрузок с высокими требованиями к току.
Для регулятора тока на базе LM317 рассмотрите схему ниже;
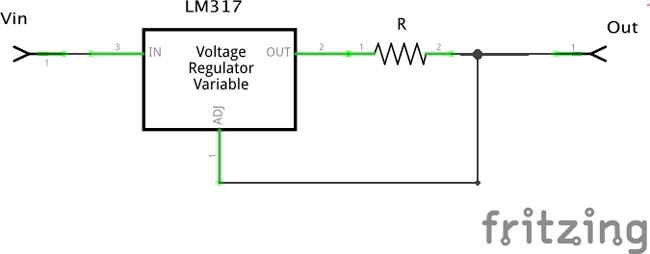
LM317 сконструированы таким образом, что регулятор продолжает регулировать свое напряжение до тех пор, пока напряжение между его выходным контактом и его регулировочным контактом не станет равным 1.25 В и как таковой делитель обычно используется при реализации в ситуации регулятора напряжения. Но для нашего случая использования в качестве регулятора тока это на самом деле очень упрощает нам задачу, потому что, поскольку напряжение постоянно, все, что нам нужно сделать, чтобы сделать ток постоянным, — это просто вставить резистор последовательно между выводами Vout и ADJ. как показано на схеме выше. Таким образом, мы можем установить выходной ток на фиксированное значение, которое задается:
I = 1,25 / R
Значение R является определяющим фактором значения выходного тока.
Чтобы создать регулятор переменного тока, нам нужно только добавить переменный резистор в схему вместе с другим резистором, чтобы создать делитель на регулируемом выводе, как показано на изображении ниже.
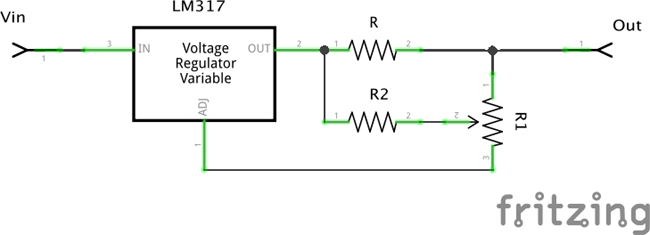
Работа схемы такая же, как и в предыдущей, с той разницей, что ток можно регулировать в цепи, поворачивая ручку потенциометра для изменения сопротивления. Напряжение на R составляет:
В = (1 + R1 / R2) x 1.25
Это означает, что ток через R равен;
I R = (1,25 / R) x (1+ R1 / R2).
Это дает цепи диапазон тока I = 1,25 / R и (1,25 / R) x (1 + R1 / R2)
Зависит от установленного тока; убедитесь, что номинальная мощность резистора R может выдерживать ток, протекающий через него.
Преимущества и недостатки использования LDO в качестве регулятора тока
Ниже приведены некоторые преимущества для выбора подхода линейного регулятора напряжения.
- ИС регулятора
- включают защиту от перегрева, которая может пригодиться при подключении нагрузок с повышенными требованиями к току. ИС регулятора
- имеют больший допуск для больших входных напряжений и в значительной степени поддерживают высокое рассеивание мощности.
- Подход ИС регулятора предполагает использование меньшего количества компонентов с добавлением лишь нескольких резисторов в большинстве случаев, за исключением случаев, когда требуются более высокие токи и подключены силовые транзисторы.Это означает, что вы можете использовать одну и ту же ИС для регулирования напряжения и тока.
- Уменьшение количества компонентов может означать снижение стоимости внедрения и времени разработки.
Недостатки:
С другой стороны, конфигурации, описанные в рамках подхода ИС регулятора, позволяют пропускать тока покоя от регулятора к нагрузке в дополнение к регулируемому выходному напряжению. Это приводит к ошибке, которая может быть недопустимой в некоторых приложениях.Однако это можно уменьшить, выбрав регулятор с очень низким током покоя.
Еще одним недостатком подхода ИС к регулятору является отсутствие гибкости в конструкции.
Помимо использования микросхем регуляторов напряжения, регуляторы тока также могут быть спроектированы с использованием желейных частей, включая транзисторы, операционные усилители и стабилитроны с необходимыми резисторами. Стабилитрон используется в схеме, вероятно, просто, как будто вы помните, что стабилитрон используется для регулирования напряжения.Конструкция регулятора тока с использованием этих частей является наиболее гибкой, поскольку их обычно легко интегрировать в существующие схемы.
Регулятор тока на транзисторах
В этом разделе мы рассмотрим два дизайна. В первом будут использованы только транзисторы, а во втором — операционный усилитель и силовой транзистор .
Для модели с транзисторами рассмотрим схему ниже.
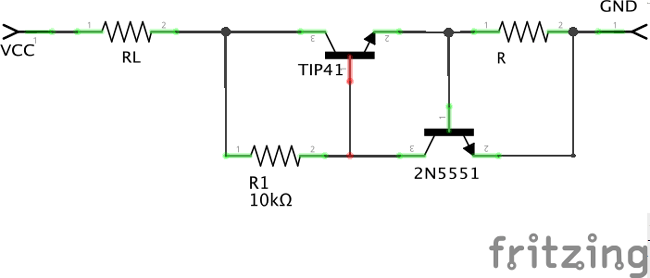
Регулятор тока, описанный на схеме выше, является одной из простейших конструкций регулятора тока. Это регулятор тока низкой стороны ; Подключал после нагрузки до земли. Он состоит из трех основных компонентов; управляющий транзистор (2N5551), силовой транзистор (TIP41) и шунтирующий резистор (R). Шунт, который по сути представляет собой резистор малой мощности, используется для измерения тока, протекающего через нагрузку.При включении цепи на шунте отмечается падение напряжения. Чем выше значение сопротивления нагрузки RL, тем больше падение напряжения на шунте. Падение напряжения на шунте действует как триггер для управляющего транзистора, так что чем выше падение напряжения на шунте, тем больше транзистор проводит и регулирует напряжение смещения, приложенное к базе силового транзистора, чтобы увеличить или уменьшить проводимость с резистор R1, действующий как резистор смещения.
Как и в других схемах, переменный резистор может быть добавлен параллельно шунтирующему резистору для изменения уровня тока путем изменения величины напряжения, приложенного к базе управляющего транзистора.
Регулятор тока с операционным усилителем
Для второго варианта проектирования рассмотрим схему ниже;
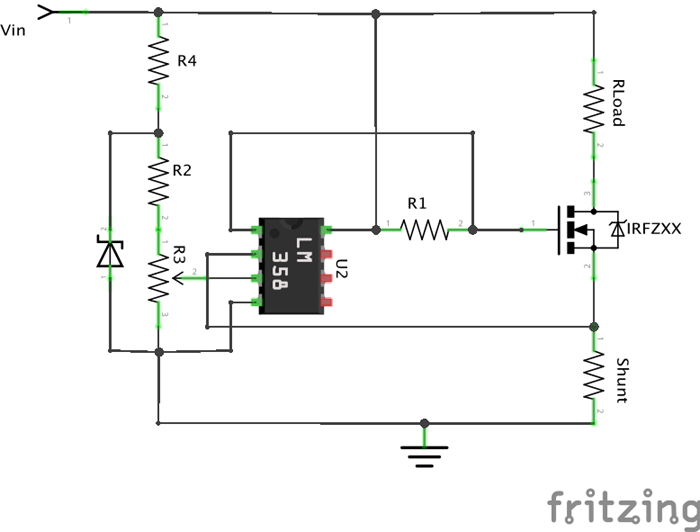
Эта схема основана на операционном усилителе , и, как и в примере с транзистором, также использует шунтирующий резистор для измерения тока. Падение напряжения на шунте подается в операционный усилитель, который затем сравнивает его с опорным напряжением, установленным стабилитроном ZD1.Операционный усилитель компенсирует любые расхождения (высокие или низкие) в двух входных напряжениях, регулируя свое выходное напряжение. Выходное напряжение операционного усилителя подключается к мощному полевому транзистору, и проводимость зависит от приложенного напряжения.
Основное различие между этой конструкцией и первым из них является источник опорного напряжения осуществляется диодом Зенера. Обе эти конструкции являются линейными, и при высоких нагрузках будет выделяться большое количество тепла, поэтому к ним должны быть присоединены радиаторы для отвода тепла.
Преимущества и недостатки
Основным преимуществом этого подхода к проектированию является гибкость, которую он предоставляет проектировщику. Детали могут быть выбраны, а конструкция сконфигурирована по вкусу без каких-либо ограничений, связанных с внутренней схемой, которая характерна для подхода, основанного на регуляторе на основе ИС.
С другой стороны, этот подход имеет тенденцию быть более утомительным, трудоемким, требует большего количества деталей, громоздких, подверженных сбоям и более дорогих по сравнению с подходом на основе регуляторов.
Применение регуляторов тока
Регуляторы постоянного тока находят применение во всех видах устройств, от цепей питания до цепей зарядки аккумуляторов, драйверов светодиодов и других приложений, где необходимо регулировать фиксированный ток независимо от приложенной нагрузки.
Вот и все! Надеюсь, вы узнали одну или две вещи.
До следующего раза!
,Регулятор головки канала и типы регуляторов в каналах
Перейти к основному содержаниюДополнительное меню
- Насчет нас
- Контактная информация
- Домой
О гражданском строительстве
- Домой
- Гражданские ноты
Банкноты
- Строительные материалы
- Строительство зданий
- Механика грунта
- Геодезия и выравнивание
- Ирригационная техника
- Инженерия окружающей среды
- Дорожная инженерия
- Инфраструктура
- Строительная инженерия
Лабораторные заметки
- Инженерная механика
- Механика жидкости
- Почвенные лабораторные эксперименты
- Экологические эксперименты
- Материалы Испытания
- Гидравлические эксперименты
- Дорожные / шоссе тесты
- Стальные испытания
- Практика геодезии
- Загрузки
- Исследовательская работа
- Учебники
Учебные пособия
- Primavera P3
- Primavera P6
- SAP2000
- AutoCAD
- VICO Constructor
- MS Project
- Разное
- Q / Ответы
- Домой
- Гражданские ноты
- Строительство зданий
- Строительные материалы
- Механика грунта
- Геодезия и выравнивание
- Ирригационная техника
- Учебники
- Primavera P6
- SAP2000
- AutoCAD
- Загрузки
- Исследовательская работа
- Q / Ответы
- глоссарий