| Термин | Описание |
| Сиденья Zero-gravity | На создание сидений Zero-Gravity инженеров Nissan вдохновили исследователи космоса — астронавты, свободно парящие в «нейтральной» позе в невесомости. Это — результат точных расчетов, обеспечивающий индивидуальный уровень поддержки каждой части тела. |
| Система Common Rail | Система непосредственного впрыска топлива дизельных двигателей, поддерживающая постоянное высокое давление в топливной магистрали. Электронные системы двигателя регулируют давление и момент впрыска топлива в зависимости от скорости и нагрузки двигателя. |
| Система автоматического переключения дальнего света на ближний | Позволяет автоматически переключать свет фар между ближним и дальним светом в зависимости от наличия встречного транспорта. |
| Система активного контроля траектории движения притормаживает внутренние колеса в повороте или на скользкой поверхности для снижения недостаточной поворачиваемости. Принцип работы данной системы во многом схож с самоблокирующимся дифференциалом. | |
| Система активного торможения двигателем (AEB) | Система для автомобилей с автоматической коробкой передач, помогающая снизить скорость автомобиля с помощью дополнительного торможения двигателем. |
| Система активного шумоподавления | Система активного шумоподавления (ANC, ANR) — это способ заглушения нежелательных звуков путем генерации специального звука в противофазе. |
| Система бесключевого доступа «I-key» (чип-ключ) | Система бесключевого доступа позволяет открыть дверь или багажник простым нажатием на кнопку на ручке. Часто данная система также используется для запуска двигателя с кнопки, что полностью исключает необходимость доставать ключ. |
| Система впрыска топлива | Система обеспечивает впрыск точного объема топлива в камеры сгорания двигателя. Она является более эффективной по сравнению с карбюраторами, которые ранее применялись на бензиновых двигателях. |
| Система гашения колебаний кузова | |
| Система контроля рядности движения | Система выдает визуальное и звуковое предупреждение в случае пересечения автомобилем границы полосы движения. При этом система настолько интеллектуальна, что не будет реагировать на перестроение, если вы включите указатель поворота. |
| Система контроля усталости водителя | Система контроля усталости водителя помогает избежать снижения уровня концентрации. Система с помощью датчиков анализирует стиль вождения и в случае необходимости отображает предупреждение (символ кофейной чашки) на экране приборной панели при обнаружении непоследовательности действий водителя, сигнализируя о необходимости остановиться и отдохнуть. |
| Система кругового обзора (AVM) | Система кругового обзора преобразует картинку, получаемую с 4 широкоугольных камер в единое изображение 360 градусов на экране автомобиля. |
| Система мониторинга «слепых» зон | Система для обнаружения транспортных средств в слепых зонах с обеих сторон автомобиля. При обнаружении автомобиля в слепой зоне на соответствующем элементе бокового зеркала заднего вида отображается предупреждающий сигнал. |
| Система переключения режимов вождения | Система, изменяющая остроту реакции двигателя и рулевого управления (а также КПП на моделях с вариатором) одним нажатием на кнопку. |
| Система помощи при спуске | Автоматически контролирует скорость движения и давление в тормозной системе для обеспечения контролируемого спуска. |
| Система помощи при старте в гору | Препятствует откату автомобиля назад, удерживая давление в тормозной системе в течение нескольких секунд, что позволяет водителю перенести ногу с педали тормоза на педаль акселератора. |
| Система предотвращения фронтальных столкновений | Данная система определяет угрозу столкновения. Она оповещает об этом визуальным и звуковым сигналом, и, в случае отсутствии реакции водителя, самостоятельно останавливает автомобиль. |
| Система прямого впрыска | Одна из систем управления бензиновым или дизельным двигателем, обеспечивающая прямой впрыск топлива в цилиндры двигателя вместо форкамеры или впускного коллектора. Прямой впрыск обеспечивает более эффективное воспламенение, меньший расход топлива и объем выбросов. |
| Система распознавания движущихся объектов | Система обеспечивает обнаружение движущихся объектов — либо только в задней части автомобиля с использованием одной камеры, либо вокруг автомобиля с использованием системы кругового обзора, состоящей из четырех камер. |
| Система стабилизации положения кузова | Система стабилизации положения кузова компенсирует перемещение кузова в дополнение к стандартной системе амортизаторов. |
| Сцепление | Компонент силового блока, соединяющий двигатель и трансмиссию, который используется для отключения трансмиссии от двигателя для переключения передачи. Нажатие на педаль сцепления позволяет водителю бесшумно переключать передачи. |
| Тип кузова | Тип транспортного средства определяется формой или стилем его кузова, например спортивный автомобиль, внедорожник и др. |
| Топливная ячейка | Силовая установка; в настоящий момент находится в разработке. Топливная ячейка вырабатывает электричество в результате реакции кислорода и водорода. Единственным продуктом реакции является водяной пар. |
| Турбина | Принудительно нагнетает больше воздуха в цилиндры для сжигания большего объема топлива и увеличения мощности. |
| Усилитель руля | Гидравлическая или электрическая система, облегчающая вращение руля. |
| Цилиндрическая пружина | Пружина спиральной формы. Цилиндрические пружины используются в подвеске большинства автомобилей. |
| Шасси | Конструкция, поддерживающая кузов, двигатель, силовой блок и подвеску автомобиля. |
| Электрообогрев лобового стекла | Функция подогрева лобового стекла автомобиля. |
Особенности Nissan Murano
Особенности Nissan Murano Nissan Murano Nissan Murano Показать больше Все о модели Удовольствие в деталях
Комфорт премиум-класса
Оснащение Nissan Murano
Благодаря системе Intelligent Key премиальный кроссовер Nissan Murano подстраивается именно под вас. При нажатии кнопки на двери водителя система запоминания индивидуальных параметров регулирует положение руля, сиденья и наружных зеркал еще до того, как вы садитесь за руль.
Инновационные сиденья Zero Gravity
Cистема дистанционного запуска двигателя
Двухзонный климат-контроль
Передние сиденья с функциями подогрева и охлаждения* и задние сиденья снабжены функцией быстрого подогрева Quick Comfort.
Перчатки вам не понадобятся. Nissan MURANO оснащен функцией подогрева руля, благодаря которой ваши руки быстро согреются даже самым морозным утром.
Отображение актуальных показателей климат-контроля на мониторе
1
ИНДИВИДУАЛЬНЫЕ НАСТРОЙКИ
ПРАКТИЧНОСТЬ ТЕХНОЛОГИЙ
Murano является «умным» премиальным кроссовером благодаря встроенным мультимедийной и навигационной системам NissanConnect*. Будьте на связи, слушайте любимую музыку и свободно ориентируйтесь в любом городе с помощью восьмидюймового цветного сенсорного экрана.
Nissan Murano. Видит то, что скрытоNissan Murano с интеллектуальной системой кругового обзора.
Nissan Murano. Запоминает любимое положениеNissan Murano c памятью настроек водительского места.
Nissan Murano. Понимает прикосновенияNissan Murano с сенсорным дисплеем.
%PDF-1.5 % 3 0 obj >/OCGs[125 0 R 3564 0 R]>>/Type/Catalog>> endobj 7136 0 obj >stream application/pdf
DJI Mavic 2: режимы полета и съемки

Хотите пилотировать DJI Mavic 2 безопасно и правильно? Тогда заказывайте обучающий видеокурс «DJI Mavic 2. Настройка, управление, режимы, секреты полета»! За несколько уроков вы узнаете все о режимах полета коптера, их подрежимах, работе системы оптических и инфракрасных сенсоров, функциях возврата в точку взлета и аварийной посадки, научитесь работать с DJI GO 4 и познакомитесь с каждым пунктом меню приложения.
Основные режимы полета
Mavic 2 предлагает четыре режима управления на выбор, три из которых можно активировать вручную с помощью переключателя. S – спорт режим, его используют в основном для съемок на высокой скорости. P – режим позиционирования, в нем мы проводим большую часть времени. T – режим штатива, он позволяет снимать максимально кинематографичную картинку. Познакомимся с ними ближе.
В режиме позиционирования мы получаем доступ к интеллектуальным функциям управления коптером. В данном режиме дрон использует датчики распознающие препятствия и GPS-систему для определения своего местоположения, обеспечивая максимально стабильный полет и предотвращая столкновения.
Режим спорт отключает интеллектуальные функции и все системы обнаружения препятствий, а для позиционирования в пространстве дрон использует GPS. Максимальная скорость полета составляет 72 км/ч.
В режиме штатива система определения препятствий будет работать в полную силу и по всем направлениям, но с ограничением по скорости полета и изменению высоты.
Периодически на экране будут появляться различные статусы, относящиеся к режиму Р, а именно:
GPS mode — это значит что дрон использует GPS для позиционирования в пространстве;
Opti mode — режим оптического позиционирования;
Atti mode – так называемый режим барометра, в котором коптер способен фиксировать только лишь высоту.
Подробнее про основные режимы полета и Cinematic Mode можно узнать в нашем видео:
Hyperlapse
Hyperlapse представляет собой режим, в котором дрон делает фотографии с определенным интервалом и после самостоятельно создает из них видео. Интервал между кадрами и длительность ролика выбираем мы сами. Hyperlapse включает в себя четыре подрежима: Free, Circle, Course Lock и Waypoint. Поговорим о них подробнее.
Free — съемка осуществляется как из одной точки, так и во время перемещения дрона. После программа соединит все кадры и создаст ролик. При управлении коптером в данном подрежиме, программа предложит включить круиз контроль с помощью кнопок С1 или С2. Это очень полезная функция, которая позволяет задать команды джойстиками, например, лететь вперед и вправо, а затем, активировав ее, отпустить контроллеры и наблюдать за самим процессом съемки и дополнительно подруливать, если это необходимо.
В подрежиме Circle дрон совершает съемку выбранного нами объекта, кружась вокруг него. Перед началом полета мы так же как и в предыдущем режиме обозначаем интервал между кадрами, продолжительность видео и сторону движения дрона во время съемки. Затем необходимо выбрать непосредственно сам объект.
Course Lock — дрон автоматически летит в заданном направлении, а пилот управляет наклоном подвеса. Для его активации, помимо основных настроек интервала между кадрами и продолжительности ролика, нам необходимо выбрать и направление движения коптера.
Подрежим Waypoint отличается от всех остальных тем, что дрон совершает съемку перемещаясь по заранее установленным точкам. Значок In order — то есть «по порядку» — означает, что дрон будет двигаться от первой точки к последней, а если мы переключим его на Reversed, то он проделает путь от последней точки к первой соответственно. Помимо фиксации точек мы можем устанавливать направление и угол наклона камеры, но если отклонение подвеса будет слишком сильным, то во избежание потери плавности картинки дрон не даст записать данное положение и выдаст предупреждающее сообщение.
Про все тонкости работы режима Hyperlapse смотрим здесь:
Quickshot
Режим Quickshot предназначен для быстрого создания эффектных роликов, которые впоследствии можно выложить в социальные сети или поделиться ими с друзьями. Он включает в себя целых семь подрежимов:
Dronie — коптер снимает объект, удаляясь от него и по диагонали набирая высоту. По окончании съемки дрон вернется на исходную позицию;
Circle — дрон снимает объект облетая его вокруг;
Helix — дрон не просто облетает объект вокруг, а отдаляется от него по спирали;
Rocket — дрон снимает объект, взмывая вверх и отдаляясь от земли на заданное расстояние;
Boomerang — позволяет снимать объект, облетая его по овальной траектории с подъемом в дальней точке и последующим возвратом в точку старта;
Asteroid — дрон летит назад и вверх, записывая видео и делая сферическую панораму в конце полета, и объединяет съемку и панораму в короткое видео;
DollyZoom — доступен только в версии Mavic 2 Zoom. Коптер отдаляется от объекта съемки с одновременным его приближением за счет встроенного зума.
Мы разобрали все нюансы режима Quickshot в одном наглядном видео:
Point of Interest
В этом режиме достаточно выбрать какой-либо объект и Mavic 2 начнет вести съемку, облетая вокруг него по окружности. При этом вы можете заранее выбрать радиус (от 5 до 500 метров), высоту (от 2 до 120 метров) и скорость полета (от 0 до 10 метров в секунду), а также направление движения — по часовой или против часовой стрелке.
Все эти параметры можно изменять в процессе съемки с помощью экрана смартфона или джойстиков. Левый стик в этом случае отвечает за радиус и скорость полета. Например, потяните его назад и радиус полета увеличивается, а при отклонении вправо или влево дрон на время изменит скорость или направление движения. Правый джойстик отвечает за высоту полета и направление носа дрона. В данном режиме вы можете поворачивать дрон в разные стороны и изменять наклон подвеса для поиска нужного кадра.
Стоит отметить, что после активации Point of Interest боковые датчики будут неактивны и пилоту необходимо внимательно выбирать локацию для съемки.
Подробнее про режимы Point of Interest:
ActiveTrack
Режим, в котором дрон с помощью камер распознает объект и постоянно держит его в кадре. ActiveTrack буквально освобождает нам руки и позволяет коптеру автономно запечатлеть желаемые моменты нашей жизни. Эта функция незаменима во время съемки различных активностей: занятий спортом, туризма или просто прогулки.
ActiveTrack состоит из трех подрежимов:
Trace — непосредственное преследование объекта. Дрон определит все потенциальные цели съемки, которые находятся на экране, и отметит их. Пилоту достаточно выбрать необходимый предмет и Mavic 2 буквально отправляется за ним по пятам не оставляя шансов скрыться из виду;
Profile — дрон ведет съемку сбоку, двигаясь по параллельной от объекта траектории. Активация происходит аналогично подрежиму Trace;
Spotlight — находясь в одной точке в пространстве, либо управляемый пилотом, коптер постоянно держит объект в кадре. Также присутствует блокировка по курсу, которая облегчает для пилота процесс съемки.
Как работать с режимом ActiveTrack можно узнать в видео:
TapFly
Режим TapFly позволяет пилоту сосредоточиться на съемке, в то время как коптер самостоятельно будет лететь в заданном направлении. Достаточно выбрать на экране точку, к которой или от которой должен лететь Mavic 2 — коптер сам проложит траекторию полета, а нам остается только снимать окружающий пейзаж.
TapFly включает в себя три подрежима:
Forward — коптер летит в указанном направлении, а пилот управляет подвесом и корректирует курс с помощью джойстиков. При помощи пульта можно корректировать курс дрона в полете, наклоняя левый джойстик влево или вправо, и изменять высоту, наклоняя его же вперед и назад.
Reverse — коптер движется назад в направлении от указанной точки, в то время как мы управляем подвесом, либо корректируем курс с пульта.
Free — Mavic 2 летит в заданном направлении, а пилот с помощью левого стика может вращать дрон в разные стороны для удержания объекта в кадре, не меняя направления полета.
Про все тонкости работы режима TapFly:
поддержка и руководствоумные режим полетаMavic 2Mavic 2 ProMavic 2 ZoomActiveTrackQuickshotHyperlapse
распознавание объектов в реальном времени
В этой статье мы будем разбирать код программы, в которой используется Deep Learning и OpenCV. Её суть: распознавание объектов в реальном времени.
Этот пост разделён на две части. В первой части мы рассмотрим реализацию распознавания объектов в реальном времени, используем deep-learning и OpenCV, чтобы работать с видео потоками и видеофайлами. В этом нам поможет высокоэффективный класс VideoStream, подробнее о нём читайте здесь.
Оттуда мы возьмём Deep Learning, код для обнаружения объекта и код для измерения FPS.
Часть 1: распознавание объектов в реальном времени — работаем с кодом
Чтобы сделать детектор объектов в реальном времени, нам потребуется:
- Получить доступ к нашей веб-камере/видео потоку.
- Применить распознавание объекта для каждого кадра.
Чтобы посмотреть, как это делается, откройте новый файл, назовите его real_time_object_detection.py и вставьте следующий код:
# import the necessary packages from imutils.video import VideoStream from imutils.video import FPS import numpy as np import argparse import imutils import time import cv2
Мы начали с импортирования библиотек (на строках 2-8). Для этого вам необходим imutils и OpenCV.
Пишем код для работы с командной строкой.
Далее анализируем аргументы командной строки:
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-p", "--prototxt", required=True,
help="path to Caffe 'deploy' prototxt file")
ap.add_argument("-m", "--model", required=True,
help="path to Caffe pre-trained model")
ap.add_argument("-c", "--confidence", type=float, default=0.2,
help="minimum probability to filter weak detections")
args = vars(ap.parse_args())- —prototxt : Путь к prototxt Caffe файлу.
- —model : Путь к предварительно подготовленной модели.
- —confidence : Минимальный порог валидности (сходства) для распознавания объекта (значение по умолчанию — 20%).
Добавляем основные объекты.
Затем мы инициализируем список классов и набор цветов:
# initialize the list of class labels MobileNet SSD was trained to # detect, then generate a set of bounding box colors for each class CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"] COLORS = np.random.uniform(0, 255, size=(len(CLASSES), 3))
На строках 22-26 мы инициализируем метки CLASS и соответствующие случайные цвета.
Теперь загрузим модель и настроим наш видео поток:
# load our serialized model from disk
print("[INFO] loading model...")
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])
# initialize the video stream, allow the cammera sensor to warmup,
# and initialize the FPS counter
print("[INFO] starting video stream...")
vs = VideoStream(src=0).start()
time.sleep(2.0)
fps = FPS().start()Загружаем нашу сериализованную модель, предоставляя ссылки на prototxt и модели (строка 30) — обратите внимание, насколько это просто в OpenCV.
Затем инициализируем видео поток (это может быть видеофайл или веб-камера). Сначала запускаем VideoStream (строка 35), затем мы ждём, пока камера включится (строка 36), и, наконец, начинаем отсчёт кадров в секунду (строка 37). Классы VideoStream и FPS являются частью пакета imutils.
Пишем код для работы с кадрами.
Теперь проходим по каждому кадру (чтобы увеличить скорость, можно пропускать кадры).
# loop over the frames from the video stream while True: # grab the frame from the threaded video stream and resize it # to have a maximum width of 400 pixels frame = vs.read() frame = imutils.resize(frame, width=400) # grab the frame dimensions and convert it to a blob (h, w) = frame.shape[:2] blob = cv2.dnn.blobFromImage(cv2.resize(frame, (300, 300)), 0.007843, (300, 300), 127.5) # pass the blob through the network and obtain the detections and # predictions net.setInput(blob) detections = net.forward()
Первое, что мы делаем — считываем кадр (строка 43) из потока, затем заменяем его размер (строка 44).
Поскольку чуть позже нам понадобится ширина и высота, получим их сейчас (строка 47). Затем следует преобразование кадра в blob с модулем dnn (строки 48 и 49).
Теперь к сложному: мы устанавливаем blob как входные данные в нашу нейросеть (строка 53) и передаём эти данные через net (строка 54), которая обнаруживает наши предметы.
«Фильтруем» объекты.
На данный момент, мы обнаружили объекты в видео потоке. Теперь пришло время посмотреть на значения валидности и решить, должны ли мы нарисовать квадрат вокруг объекта и повесить лейбл.
# loop over the detections
for i in np.arange(0, detections.shape[2]):
# extract the confidence (i.e., probability) associated with
# the prediction
confidence = detections[0, 0, i, 2]
# filter out weak detections by ensuring the `confidence` is
# greater than the minimum confidence
if confidence > args["confidence"]:
# extract the index of the class label from the
# `detections`, then compute the (x, y)-coordinates of
# the bounding box for the object
idx = int(detections[0, 0, i, 1])
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h])
(startX, startY, endX, endY) = box.astype("int")
# draw the prediction on the frame
label = "{}: {:.2f}%".format(CLASSES[idx],
confidence * 100)
cv2.rectangle(frame, (startX, startY), (endX, endY),
COLORS[idx], 2)
y = startY - 15 if startY - 15 > 15 else startY + 15
cv2.putText(frame, label, (startX, y),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2)Мы начинаем проходить циклами через наши detections, помня, что несколько объектов могут быть восприняты как единое изображение. Мы также делаем проверку на валидность (т.е. вероятность) для каждого обнаружения. Если валидность достаточно велика (т.е. выше заданного порога), отображаем предсказание в терминале, а также рисуем на видео потоке предсказание (обводим объект в цветной прямоугольник и вешаем лейбл).
Давайте разберём по строчкам:
Проходим по detections, получаем значение валидности (строка 60).
Если значение валидности выше заданного порога (строка 64), извлекаем индекс лейбла в классе (строка 68) и высчитываем координаты рамки вокруг обнаруженного объекта (строка 69).
Затем, извлекаем (x;y)-координаты рамки (строка 70), которые будем использовать для отображения прямоугольника и текста.
Делаем текстовый лейбл, содержащую имя из CLASS и значение валидности (строки 73 и 74).
Также, рисуем цветной прямоугольник вокруг объекта, используя цвета класса и раннее извлечённые (x;y)-координаты (строки 75 и 76).
В целом, нужно, чтобы лейбл располагался над цветным прямоугольником, однако, может возникнуть такая ситуация, что сверху будет недостаточно места, поэтому в таких случаях выводим лейбл под верхней стороной прямоугольника (строка 77).
Наконец, мы накладываем цветной текст и рамку на кадр, используя значение ‘y’, которое мы только что вычислили (строки 78 и 79).
Оставшиеся задачи:
- Отображение кадра
- Проверка ключа выхода
- Обновление счётчика FPS
# show the output frame
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# if the `q` key was pressed, break from the loop
if key == ord("q"):
break
# update the FPS counter
fps.update()Код вверху довольно очевиден: во-первых, выводим кадр (строка 82). Затем фиксируем нажатие клавиши (строка 83), проверяя, не нажата ли клавиша «q» (quit). Если условие истинно, мы выходим из цикла (строки 86 и 87).
Наконец, обновляем наш счётчик FPS (строка 90).
Если происходит выход из цикла (нажатие клавиши «q» или конец видео потока), у нас есть вещи, о которых следует позаботиться:
# stop the timer and display FPS information
fps.stop()
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
# do a bit of cleanup
cv2.destroyAllWindows()
vs.stop()При выходе из цикла, останавливаем счётчик FPS (строка 92) и выводим информацию о конечном значении FPS в терминал (строки 93 и 94).
Закрываем окно программы (строка 97), прекращая видео поток (строка 98).
Если вы зашли так далеко, вероятно, вы готовы попробовать программу на своей веб-камере. Чтобы посмотреть, как это делается, перейдём к следующему разделу.
Часть 2: тестируем распознавание объектов в реальном времени на веб-камере
Чтобы увидеть детектор объектов в реальном времени в действии, убедитесь, что вы скачали исходники и предварительно подготовленную Convolutional Neural Network.
Оттуда открываете терминал и выполняете следующие команды:
$ python real_time_object_detection.py \ --prototxt MobileNetSSD_deploy.prototxt.txt \ --model MobileNetSSD_deploy.caffemodel [INFO] loading model... [INFO] starting video stream... [INFO] elapsed time: 55.07 [INFO] approx. FPS: 6.54
При условии, что OpenCV может получить доступ к вашей веб-камере, вы должны увидеть выходной кадр с любыми обнаруженными объектами. Я привёл примеры результатов в видео ниже:
Заметьте, что распознаватель объектов может обнаруживать не только меня (человека), но и диван, на котором я сижу и стул рядом со мной. И всё это в реальном времени.
Оригинал здесь
система распознавания объектов и слежения за ними — патент РФ 2251739
Изобретение относится к системам распознавания объектов и слежения за ними. Его использование позволяет получить технический результат в виде создания такой системы, приспособленной для распознавания объектов определённого типа, к примеру, в магазинах или на магистралях. Этот результат достигается за счёт того, что система имеет матричные датчики, каждый из которых предназначен для выполнения функций датчика первого типа, обеспечивающего возможность обнаружения присутствия объекта в рабочей зоне датчика и определения его положения, и датчика второго типа, обеспечивающего возможность использования этого положения объекта, определенного датчиком первого типа, для идентификации или распознавания объекта и возможность фокусирования или работы с более высокой разрешающей способностью, чем датчик первого типа. 15 з.п.ф-лы, 12 ил.
Область техники
Изобретение касается системы распознавания объектов и слежения за ними.
Обзор известных технических решений
Известны системы для подсчета объектов, таких как люди, проходящие по коридору, например, в торговом центре, но такие системы не приспособлены для распознавания или различения объектов определенного типа или различных типов и их положения и для слежения за такими объектами в течение времени.
Целью данного изобретения является создание системы распознавания объектов и слежения за ними.
Сущность изобретения
В соответствии с одной из форм своего осуществления, которая может не быть единственной или самой широкой, изобретение касается системы распознавания объектов и слежения за ними, содержащей по меньшей мере один матричный датчик, причем указанный или каждый матричный датчик содержит датчик первого типа и датчик второго типа, датчик первого типа выполнен с возможностью обнаружения присутствия объекта в рабочей зоне датчика и определения его положения, а датчик второго типа выполнен с возможностью использования этого определенного первым датчиком положения объекта для идентификации или распознавания объекта либо для подсчета или регистрации присутствия объекта, если он является объектом некоторого выбранного типа.
Присутствие объекта, которое определяется первым датчиком, может быть обнаружено по изменениям в контрастных границах или по изменениям в картине изображения либо по перемещениям. Таким образом можно обнаруживать объекты, которые движутся в рабочей зоне датчика.
Датчики могут быть выполнены с возможностью использования части электромагнитного спектра, выбранной из радиолокационного, микроволнового, радиочастотного, инфракрасного, миллиметрового и оптического диапазонов либо с возможностью использования звуковой локации или другой системы обнаружения.
Датчики первого и второго типов могут быть приборами одного типа или же они могут быть приборами различных типов. Таким образом, датчик первого типа может быть телевизионной камерой с низкой разрешающей способностью, а датчик второго типа может быть радиочастотной системой обнаружения.
В случае, если первый датчик и второй датчик фактически являются одним и тем же прибором, второй датчик может работать с более высокой разрешающей способностью, чем первый, или может быть датчиком конкретного идентифицирующего типа.
В предпочтительной форме осуществления изобретения датчик первого типа может являться прибором типа глаза насекомого. А именно он может быть датчиком, который предназначен для обнаружения изменений в контрасте между смежными пикселами в поле зрения, а не для окончательной идентификации объектов. В такой форме осуществления изобретения датчик второго типа может быть датчиком с цифровой обработкой сигнала, например цифровым телевизионным датчиком. Таким образом, датчик первого типа служит для того, чтобы идентифицировать в рабочей зоне датчика определенную область, представляющую интерес, а затем датчик с цифровой обработкой сигнала должен лишь идентифицировать объект, просматривая эту определенную область рабочей зоны, а не обрабатывать все телевизионное изображение контролируемого пространства. Благодаря этому требуется значительно меньшая вычислительная мощность и может быть достигнута более высокая эффективность.
Первый датчик и второй датчик могут быть одним устройством, где второй датчик обеспечивает вторую ступень обработки данных.
Таким образом, в альтернативной форме осуществления изобретения датчики первого и второго типов могут быть выполнены в виде единого телевизионного датчика, наблюдаемое которым изображение обрабатывается двумя различными путями. Сначала наблюдаемое изображение может преобразовываться в цифровую форму, записываться в следующие друг за другом области памяти, а затем последовательные изображения могут анализироваться для обнаружения изменений в последовательных кадрах цифрового изображения, которые будут указывать на перемещающуюся контрастную границу. Там самым определяется движущийся объект в рабочей зоне датчика, и то же самое цифровое изображение может затем быть проанализировано в этой определенной области рабочей зоны датчиком второго типа. Для улучшения распознавания или результата в отношении объекта, представляющего интерес, датчик второго типа может использовать последующие или предыдущие кадры.
Если процесс распознавания не достигает пороговых уровней надежности, заранее заданных или полученных в результате искусственного обучения, то тогда дополнительные хранимые или загружаемые алгоритмы могут использоваться в итеративном процессе до тех пор, пока результаты не улучшатся.
В то время как датчик первого типа используется для идентификации объектов, представляющих интерес, датчик второго типа используется для целей распознавания. Каждый объект обладает рядом характеристик, такими как масса, высота, форма, контраст, яркость, цвет, узоры, скорость, тепло, отражательная способность, сигнатура и многие другие. Каждая характеристика сама по себе не обязательно пригодна в качестве признака, который может отдельно использоваться для распознавания объекта, и некоторые характеристики могут быть более легко идентифицируемыми, чем другие. Предпочтительно, изобретение предусматривает, что анализ наиболее легко распознаваемых характеристик выполняется сначала, а затем, используя другие характеристики и следующие друг за другом во времени кадры, система на каждом шаге в процессе итеративного анализа улучшает вероятность распознавания ею объекта с большей точностью. Определение, какие характеристики анализируются сначала, и порядок, в котором они анализируются, представляет собой наиболее важную часть данного изобретения.
В еще одной форме осуществления изобретения система может быть построена с искусственным интеллектом, чтобы принимать эти решения без внешнего вмешательства. В этом случае система определяет, какая характеристика будет анализироваться сначала. С течением времени система может идентифицировать новую характеристику или новую последовательность характеристик, которые могут лучше идентифицировать объект, представляющий интерес, и поэтому становится самосовершенствующейся. В этом случае самоусовершенствованные процедуры или алгоритмы хранятся в памяти в имеющейся резидентной библиотеке для будущих обращений. Система будет использовать анализ с использованием искусственного интеллекта, чтобы решить, используя вероятностный анализ, какой алгоритм является наиболее подходящим, по его успеху и скорости распознавания.
Таким образом, изобретение в целом описывает систему, которая может быть разбита на несколько ступеней. Первая ступень обработки будет включать машину для обнаружения объекта, предназначенную для захвата изображения и загрузки последовательностей оцифрованных изображений из аппаратных средств в соответствующем цифровом формате для машины для распознавания объекта. Датчик первого типа может опознавать границу объекта, определяя ее по последовательным кадрам, когда объект перемещается через рабочую зону датчика. Датчик второго типа, который может формировать вторую ступень системы, будет машиной для распознавания объекта, которая, во-первых, используется для преобразования определенных характеристик в подходящие математические образы или алгоритмы и, во-вторых, может использоваться для представления и записи результатов в течение времени, необходимого для анализа конкретных характеристик рассматриваемых объектов. Характеристики, подвергаемые анализу, могут включать, но не ограничиваются этим, один или несколько признаков, таких как масса, высота, форма, цвет, узор, контраст, текстура, тепло, отражательная способность, частота, скорость, излучение сигнала, сигнатура и т.д. Каждой характеристике обнаруженного объекта присваивается вероятность того, что обнаружен объект, представляющий интерес. Чтобы получить более высокие уровни точности, последовательные оцифрованные изображения могут анализироваться в течение времени с использованием хранимых процедур, хранимых библиотек, алгоритмов анализа, а также итеративного процесса анализа, который может обеспечивать наблюдение множества характеристик множества объектов в реальном времени.
Каждая итерация анализа увеличивает (или уменьшает, в соответствующих случаях) вероятность для обнаруженного объекта являться объектом, представляющим интерес. Если уровень вероятности достигает заранее заданного уровня признания или порогового уровня, то объект распознается как объект, представляющий интерес. Чтобы улучшить вероятностный анализ и повысить вероятность распознавания объекта, дополнительные разновидности датчиков второго типа могут быть включены в одну рабочую зону, используемую для наблюдения различных характеристик объекта, представляющего интерес.
Датчики дополнительных разновидностей могут быть расположены в различных местах и направлены под различными углами, но для просмотра одной и той же рабочей зоны, чтобы улучшить вероятность различения объектов, позиционирования объектов в трехмерном пространстве либо определения местоположения объекта, который иначе, при использовании датчика только одного типа, был бы затенен.
Датчик второго типа может быть выполнен с возможностью запрашивания запрашиваемого устройства, связанного с объектом. В одной такой форме осуществления изобретения первый датчик может быть выполнен с возможностью наблюдения того, что объект перемещается в пределах рабочей зоны, а запрашивающее устройство второго датчика служит для последующего запроса радиочастотной сигнатурной интегральной схемы, например интегральной схемы смарт-карты или транспондера, чтобы обеспечить уверенную идентификацию объекта и его прохождения через рабочую зону датчика.
Система распознавания и слежения за объектами может включать несколько матричных датчиков, датчики нескольких типов и несколько рабочих зон датчиков.
Матричный датчик может быть выполнен с возможностью взаимодействия с соседними матричными датчиками в нескольких рабочих зонах датчиков, чтобы передавать или принимать информацию, которая принята или получена путем обучения. Эта передача информации может осуществляться по замкнутой сети типа Intranet или по открытой сети типа Internet. Решения или информация будут передаваться дальше на следующие датчики или другие устройства третьих лиц, требующие такой информации для осуществления, когда это необходимо, запрограммированных действий. Датчики могут принимать решения, подавать команды или инициировать некоторые другие формы действий без человеческого вмешательства.
Третья ступень системы может быть представлена машиной для слежения. Распознав объект, представляющий интерес, машина для слежения может выполнять такие задачи, как инициализация координатной сетки, двумерное или трехмерное отображение, назначение метки, слежение за меткой и передача метки в следующие рабочие зоны датчиков. Это требует существенно меньшей мощности обработки, чем у машины для распознавания объекта, когда идентифицированный и отмеченный меткой объект перемещается из рабочей зоны одного датчика в рабочую зону другого. Если в следующей рабочей зоне датчика появляется объект, который предварительно не был обнаружен из-за того, что был заслонен другим объектом, процесс может быть прослежен в обратном направлении по всем возможным записанным кадрам изображения и записи могут соответствующим образом корректироваться. Система в целом обновляется с помощью этой новой информации. Это существенно увеличивает точность системы. С этого момента объект может прослеживаться дальше во времени до тех пор, пока он не выйдет из всех рабочих зон датчиков. После распознавания вида объекта, который требуется отследить, позиция каждого объекта, представляющего интерес, с течением времени последовательно отображается на универсальную координатную сетку. Поскольку вычислительная мощность, необходимая для слежения, существенно уменьшается в последовательных рабочих зонах датчиков, множество объектов может быть отслежено с высоким уровнем точности и надежности.
В предпочтительной форме осуществления изобретения могут использоваться несколько матричных датчиков, датчики нескольких типов и несколько рабочих зон датчиков в двумерном или трехмерном пространстве, а система может содержать средства взаимодействия между соседними матричными датчиками для передачи слежения за выбранным объектом из одной рабочей зоны датчика в соседнюю рабочую зону датчика и регистрации перемещения объекта с течением времени.
С помощью этих средств система может быть способна следить за движущимися объектами выбранного типа в намного большей области, чем рабочая зона одного датчика. Это может быть использовано, например, если требуется отслеживать объекты как по всему торговому центру, так и в рабочих зонах отдельных датчиков, таких как выставочная площадь.
Необходимо отметить, что поскольку объекты, которые не перемещаются в рабочей зоне датчика, например предметы мебели или другие неподвижные объекты, не наблюдаются датчиком первого типа, который наблюдает только перемещающиеся контрастные границы или изменения, например, между соседними кадрами телевизионного изображения, то они не отслеживаются или не наблюдаются и вторым датчиком. Это будет экономить значительную вычислительную мощность.
Должно быть понятно, что если матричный датчик, установленный на потолке здания, смотрит по существу вниз, например на коридор, то объект, когда он находится непосредственно под датчиком, будет иметь определенный контур, а когда объект перемещается через рабочую зону датчика, контур, наблюдаемый неподвижным матричным датчиком, будет изменяться вместе с углом наблюдения. Поэтому в одной из предпочтительных форм осуществления изобретения устройство обработки данных для идентификации движущихся объектов в рабочей зоне датчика может содержать средства учета угла, под которым объект находится относительно матричного датчика, или учета смещения объектов относительно центра в пределах этой зоны.
В системе распознавания объектов и слежения за ними все или некоторые из матричных датчиков могут быть установлены сбоку от их рабочей зоны, например на стене, определяющей границу рабочей зоны, или в углах этой зоны.
Система распознавания объектов и слежения за ними согласно данному изобретению может использоваться для подсчета людей в супермаркетах или других подобных местах или для транспорта, перемещающегося вдоль дороги, для охранного наблюдения и контроля, а также для определения предпочтений людей при их передвижении по магазину или выставочной площади либо для подсчета числа людей, находящихся в трехмерном пространстве, таком как комната или некоторая территория.
Система может использоваться для отслеживания перемещений, кажущихся случайными, чтобы определять их законы или тенденции во времени.
Система может использоваться как система наблюдения с пользовательским интерфейсом, чтобы формировать удобочитаемое изображение того, что наблюдает датчик, такой как телевизионная камера.
Следует отметить, что матричный датчик может быть установлен на подвижном объекте, например на автомобиле, и его наблюдения будут касаться стационарных объектов, таких как дорожные знаки или стоп-сигналы. Он может использоваться и для обнаружения присутствия пешеходов.
Для более полного понимания ниже приводится описание изобретения со ссылкой на приложенные чертежи, на которых показана предпочтительная форма осуществления изобретения.
На чертежах:
На фиг.1 показана рабочая зона датчика с некоторыми объектами в ней.
На фиг.2 показаны объекты и области, которые наблюдаются датчиком первого типа.
На фиг.3 показана область, наблюдаемая датчиком второго типа, и обнаруживаемые им объекты.
На фиг.4 показана расширенная рабочая зона датчиков с несколькими матричными датчиками и объектами, перемещающимися по ней.
На фиг.5 показана более реалистичная картина объектов, наблюдаемых датчиком первого типа в его рабочей зоне.
На фиг.6 показаны объекты фиг.5, наблюдаемые датчиком второго типа.
На фиг.7 показана схема системы распознавания и слежения согласно данному изобретению.
На фиг.8 показана схема системы обнаружения согласно другой форме осуществления данного изобретения.
На фиг.9 показана схема системы обнаружения согласно еще одной форме осуществления данного изобретения.
На фиг.10 показана схема системы обнаружения согласно еще одной форме осуществления данного изобретения.
На фиг.11 показана схема системы обнаружения согласно еще одной форме осуществления данного изобретения.
На фиг.12 показана схема системы обнаружения согласно еще одной форме осуществления данного изобретения, использующей транспондерное сигнатурное устройство идентификации.
Подробное описание предпочтительных вариантов осуществления изобретения
Обратимся к чертежам устройств, показанных на фиг.1-3, где в рабочей зоне (контролируемом пространстве) 1 датчика имеется несколько объектов. Первым объектом является человек 2, толкающий тележку 3, а другими объектами являются два человека 4 и 5, перемещающиеся близко друг к другу.
Как можно видеть на фиг.2, деталями объектов, обнаруживаемыми датчиком 7 первого типа, являются только контур 8 человека 2, контур 9 тележки 3 и контуры 10 и 11 людей 4 и 5.
Информация об этих контурах, определяющая области, которые нужно просмотреть в деталях, передается на датчик 15 второго типа, и наблюдаемое изображение, например оцифрованное телевизионное изображение, наблюдается только в областях, показанных пунктирными линиями. Область 16 наблюдается, чтобы идентифицировать объект 2, область 17 наблюдается, чтобы идентифицировать тележку 3, но поскольку тележка не является объектом, который следует подсчитывать, устройство обработки данных системы слежения не принимает тележку 3 во внимание и не подсчитывает ее. Двое людей 4 и 5 наблюдаются при просмотре областей 18 и 19 и идентифицируются как два человека, идущие вместе.
Следовательно, система, выполненная согласно данному изобретению, в этом просматриваемом ею пространстве подсчитывает 3 человек, перемещающихся в этом пространстве, и игнорирует четвертый объект — тележку.
На фиг.4 можно видеть шесть рабочих зон 20, 21, 22, 23, 24 и 25 датчиков. Человек 28 входит в зону 21, проходит через эту зону в зону 23 и затем выходит из зоны 23 в том ее углу, который расположен по соседству с зоной 25. Человек, толкающий тележку, входит в рабочую зону 20 датчика, перемещается по диагонали через нее в рабочую зону 22 другого датчика и затем в зону 24.
Матричный датчик (матрица чувствительных элементов) 31 в рабочей зоне 21 датчика наблюдает и условно отмечает человека, входящего в рабочую зону датчика, отслеживает движение этого человека через свою рабочую зону и затем передает на матричный датчик 32 в рабочей зоне 23 информацию о том, что человек вошел в эту зону в определенном месте, и матричный датчик 32 продолжает отслеживать отмеченного человека до тех пор, пока он не оставляет рабочую зону этого датчика. За непрерывным перемещением этого человека наблюдают так, что по данным наблюдений можно проследить и определить, почему данный человек повернул в рабочей зоне 23 датчика, а не предпочел продолжить идти прямо. При наблюдении за множеством людей, перемещающихся в различных рабочих зонах датчиков, можно наблюдать некоторые тенденции, которые могут дать некоторые указания относительно того, почему такое действие происходит. Однако человек 29, толкающий тележку 30, переместился по прямой линии из одной рабочей зоны датчика в следующую. Передача функции слежения в другую зону выполнена так, что человека 28 подсчитывают только один раз, несмотря на то, что он был в двух рабочих зонах датчиков, и человека 29 подсчитывают только один раз, хотя он побывал в трех рабочих зонах. Тележку 30 не подсчитывают вообще, потому что устройства обнаружения предназначены только для наблюдения движущихся людей.
Конечно, должно быть понятно, что для других устройств обнаружения объектами, за которыми следует наблюдать, могут быть перемещающиеся тележки или транспортные средства, а люди могут игнорироваться.
На фиг.5 и 6 показана несколько более реалистичная картина, где в своей рабочей зоне 40 матричный датчик 41 первого типа наблюдает объект 42, имеющий неправильную форму, и другой объект 43, имеющий неправильную форму. Эта неправильность формы является следствием того, что наблюдаемые объекты находятся не прямо под матричным датчиком 41, и, когда наблюдаются только перемещающиеся контрастные границы, в каждом случае определяется несколько неровная контрастная граница (контур). Детали этой границы объекта передаются на второй матричный датчик 44, как показано на фиг.6, и им наблюдается только ограниченная область, в которой при данном угле наблюдения определяется, что перемещающийся объект 42 фактически является человеком, а объект 43 — тележкой. Аналогично на фиг.5 два объекта 47 и 48 имеют несколько неровную форму, но если задан их угол относительно датчика 41, они идентифицируются как люди 49 и 50.
Как можно видеть на фиг.7, матричный датчик 60 содержит датчик 61 первого типа и датчик 62 второго типа, наблюдающие за рабочей зоной 63 датчика. Первичный сигнальный процессор 64, связанный с матричным датчиком, принимает и обрабатывает сигналы от датчика 61 первого типа и подает датчику 62 второго типа команды о том, что наблюдать в рабочей зоне датчика. Детали релевантных наблюдений передаются в центральный пункт 65, который также принимает информацию от соседних матричных датчиков по линиям 66 и 67 и позволяет следить за объектами, перемещающимися по рабочим зонам соседних датчиков. Релевантная информация, такая как результаты подсчета, подается на другие матричные датчики или устройства, соединенные сетью связи, либо в устройство 68 подсчета.
На фиг.8 матричный датчик 70 находится с одной стороны от рабочей зоны и охватывает область 71, которая включает рабочую зону, состоящую их четырех секторов 72, 73, 74 и 75. В этой форме осуществления изобретения матричный датчик 70 выполняет функции как датчика первого типа, так и датчика второго типа и может обнаруживать объекты в нескольких рабочих зонах, представленных этими четырьмя секторами 72, 73, 74 и 75.
На фиг.9 матричный датчик 76 имеет по существу то же самое расположение, что и на фиг.8, с областью 71 охвата, которая включает рабочую зону, состоящую их четырех секторов 72, 73, 74 и 75. В этой форме осуществления изобретения матричный датчик 70 содержит датчик 77 первого типа и отдельный датчик 78 второго типа. Здесь датчик 77 первого типа может обнаруживать перемещение объектов в нескольких рабочих зонах, представленных этими четырьмя секторами 72, 73, 74 и 75, а датчик 78 второго типа может идентифицировать каждый объект.
На фиг.10 показано расположение матричных датчиков, при котором имеются два матричных датчика 80 и 81, каждый сбоку от рабочей зоны датчиков, состоящей из четырех секторов 72, 73, 74 и 75. Матричный датчик 80 имеет область 83 охвата, которая позволяет выполнять обнаружение и идентификацию объектов в секторах 72 и 73 рабочей зоны. Матричный датчик 81 имеет область 84 охвата, которая позволяет выполнять обнаружение и идентификацию объектов в секторах 74 и 75 рабочей зоны.
На фиг.11 матричные датчики 80 и 81 имеют по существу то же самое расположение, что и на фиг. 10, с соответствующими областями 85 и 86 охвата, но они позволяют выполнять наблюдение только в секторах 73 и 75 соответственно, в то время как наблюдение в секторах 72 и 74 обеспечивается соответствующими матричными датчиками 87 и 88, расположенными сверху.
На фиг.12 показано шоссе 90, по которому перемещаются два автомобиля 91 и 92. Автомобили 91 и 92 движутся по шоссе в различных направлениях. Автомобиль 91 имеет интегральную схему транспондера (ответчика) 93, установленную на нем, и автомобиль 92 имеет интегральную схему транспондера 93, установленную на нем. С одной стороны от шоссе 90 находится матричный датчик, содержащий первый датчик, например телевизионный датчик 95, работающий в инфракрасной области электромагнитного спектра, и второй микроволновый датчик 97, предназначенный для опроса транспондеров 93 и 94. Область 96 охвата телевизионного датчика 95 включает обе полосы дороги и значит он может обнаруживать перемещающиеся автомобили 91 и 92. Когда каждый автомобиль обнаружен, приводится в действие второй микроволновый датчик 97, чтобы опросить сфокусированными лучами 99 и 98 транспондеры 93 и 94 соответственно. Посредством этого регистрируется не только тот факт, что определенный автомобиль прошел данную точку, но также и направление его передвижения. Без первого этапа наблюдения матричный датчик может зарегистрировать, что транспондер прошел данную точку, но направление передвижения регистрироваться не будет.
В этом описании были даны различные указания относительно объема этого изобретения, но изобретение не ограничивается каким-либо одним из них, а может состоять из двух или более, объединенных вместе. Примеры приведены только для иллюстрации, а не для ограничения.
В этом описании, если из контекста не следует иного, слова «содержат», «включают» и производные от них, такие как «содержащий» и «включающий», должны пониматься как подразумевающие включение некоторого целого или их группы, но не исключение любого другого целого или их группы.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Система распознавания объектов и слежения за ними, содержащая по меньшей мере один матричный датчик, причем указанный или каждый матричный датчик предназначен для выполнения функций датчика первого типа, обеспечивающего возможность обнаружения присутствия объекта в рабочей зоне датчика и определения положения этого объекта, и датчика второго типа, обеспечивающего возможность использования этого положения объекта, определенного датчиком первого типа, для идентификации и распознавания объекта, и возможность фокусирования или работы с более высокой разрешающей способностью, чем датчик первого типа.
2. Система по п. 1, отличающаяся тем, что присутствие объекта, определяемое датчиком первого типа, может быть обнаружено по изменениям в контрастных границах или по изменениям в картине изображения или по перемещениям, и тем самым система может обнаруживать объекты, которые движутся в рабочей зоне датчика.
3. Система по п. 1, отличающаяся тем, что датчик второго типа выполнен с возможностью подсчёта или регистрации присутствия объекта, если он является объектом некоторого выбранного типа.
4. Система по п. 1, отличающаяся тем, что матричный датчик выполнен с возможностью использования части электромагнитного спектра, выбранной из радиолокационного, микроволнового, радиочастотного, инфракрасного, миллиметрового и оптического диапазонов, либо с возможностью использования звуковой локации или другой системы обнаружения.
5. Система по п. 1, отличающаяся тем, что датчики первого и второго типа выполнены в виде единого телевизионного датчика, наблюдаемое которым изображение обрабатывается двумя различными путями, при использовании первого из которых наблюдаемое изображение может оцифровываться и последовательные изображения могут анализироваться для обнаружения изменений в последовательных кадрах оцифрованного изображения, которые указывают на присутствие объекта, а при использовании второго то же самое оцифрованное изображение в определенной области рабочей зоны датчика может затем анализироваться более детально.
6. Система по п. 5, отличающаяся тем, что датчик второго типа выполнен с возможностью использования последующих или предыдущих кадров для улучшения распознавания или результата в отношении объекта, представляющего интерес.
7. Система по п. 1, отличающаяся тем, что для определения и идентификации объектов используется одна или несколько таких характеристик, как масса, высота, форма, контраст, яркость, цвет, узоры, скорость, тепло, отражательная способность, сигнатура.
8. Система по п. 1, отличающаяся тем, что она дополнительно содержит машину для слежения, выполненную с возможностью слежения за определенным объектом.
9. Система по п. 1, отличающаяся тем, что она содержит несколько матричных датчиков и несколько рабочих зон датчиков.
10. Система по п. 9, отличающаяся тем, что она включает средства взаимодействия между матричными датчиками для передачи слежения за выбранным объектом из одной рабочей зоны в соседнюю рабочую зону.
11. Система по п. 10, отличающаяся тем, что средства взаимодействия между матричными датчиками содержат средства передачи информации на следующие датчики или другие устройства третьих лиц, требующие такой информации для осуществления, когда это необходимо, запрограммированных действий без человеческого вмешательства.
12. Система по п. 1, отличающаяся тем, что она содержит средства учета угла, под которым объект находится относительно матричного датчика, или учета смещения объектов относительно центра в пределах двумерной или трехмерной зоны.
13. Система по п. 1, отличающаяся тем, что указанный или каждый матричный датчик установлен, по существу, над своей рабочей зоной.
14. Система по п. 1, отличающаяся тем, что указанный или каждый матричный датчик установлен сбоку от своей рабочей зоны.
15. Система по п. 1, отличающаяся тем, что она используется для подсчета людей в супермаркетах или других подобных местах или для транспорта, перемещающегося вдоль дороги, для охранного наблюдения и контроля и для определения законов или тенденций кажущихся случайными перемещений в течение некоторого времени, например, при передвижении людей по магазину или выставочной площади.
16. Система по п. 1, отличающаяся тем, что она используется на движущемся транспортном средстве для обнаружения объектов, которые по сравнению с транспортным средством относительно неподвижны.
Системы обнаружения движущихся объектов на проезжей части дороги
Содержание страницы
Система обнаружения пешеходов
Все большее распространение получают системы активной безопасности, обнаруживающие опасность и предупреждающие о ней водителя. Камеры и радары, установленные на автомобиле, позволяют безопасно парковаться, перестраиваться из ряда в ряд, обнаруживать на своем пути другие автомобили, пешеходов и даже диких животных.
Система обнаружения пешеходов предназначена для предотвращения столкновения с пешеходами. Она распознает людей возле автомобиля, автоматически замедляет его, снижает силу удара и даже избегает столкновения. Применение системы позволяет на 20 % сократить смертность пешеходов при ДТП и на 30 % снизить риск тяжелых травм.
Впервые система обнаружения пешеходов была использована на автомобилях Volvo в 2010 г. В настоящее время система имеет ряд модификаций:
- Pedestrian Detection System от Volvo;
- Advanced Pedestrian Detection System от TRW;
- EyeSight от Subaru.
В системе обнаружения пешеходов реализованы следующие взаимосвязанные функции:
- обнаружение пешеходов;
- предупреждение об опасности столкновения;
- автоматическое торможение.
Для обнаружения пешеходов используется одна или две видеокамеры и радар, которые эффективно работают на расстоянии до 40 м. Если пешеход обнаружен видеокамерой и результат подтвержден радаром, система отслеживает движение пешехода, прогнозирует его дальнейшее перемещение и оценивает вероятность столкновения с автомобилем. Результаты обнаружения выводятся на экран мультимедийной системы (рис. 1). Система также реагирует на автомобили, которые стоят на месте или движутся в попутном направлении.
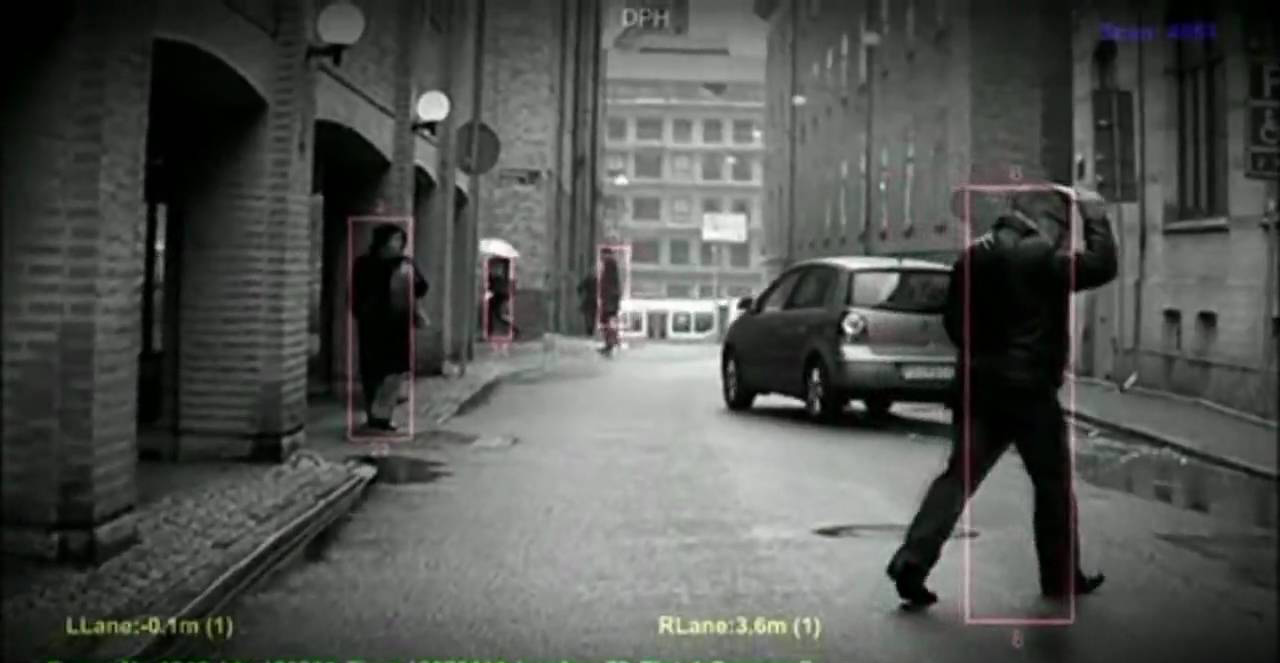
Рис. 1. Экран мультимедийной системы
Если система установила, что при текущем характере движения автомобиля столкновение с пешеходом неизбежно, посылается звуковое предупреждение водителю. Далее система оценивает реакцию водителя на предупреждение — изменение характера движения автомобиля (торможение, изменение направления движения). Если реакция отсутствует, система обнаружения пешеходов автоматически доводит автомобиль до остановки. В этом качестве система обнаружения пешеходов является производной системы автоматического экстренного торможения.
Система обнаружения пешеходов позволяет полностью избежать столкновения на скорости до 35 км/ч. При большей скорости система не может полностью предотвратить ДТП, но тяжесть последствий для пешехода может быть уменьшена за счет замедления автомобиля перед столкновением. Статистические данные свидетельствуют, что вероятность смертельного исхода от столкновения пешехода с автомобилем на скорости 65 км/ч составляет 85 %, 50 км/ч — 45 %, 30 км/ч — 5 %.
Риск травмирования пешеходов значительно снижается, если система обнаружения пешеходов используется совместно с системой защиты пешеходов или подушкой безопасности для пешеходов. Обнаружение пешеходов с помощью инфракрасных камер реализовано в системе ночного видения, но активное предупреждение столкновения в ней не предусмотрено.
Система обнаружения пешеходов показала свою эффективность в сложных условиях городского движения. Она позволяет одновременно отслеживать несколько пешеходов, движущихся различными курсами, различает движение пешеходов с зонтами во время дождя и пр. Система неработоспособна ночью и в плохую погоду.
Система предупреждения о велосипедистах
Компания Jaguar Land Rover предложила инновационную систему предупреждения о велосипедистах. Система Bike Sense при потенциальной опасности столкновения с велосипедистом задействует зрение, слух и тактильные ощущения водителя. При этом воздействие на водителя производится на инстинктивном уровне, что позволяет быстрее перейти к действию.

Система предупреждения о велосипедистах, являясь электронной, включает входные устройства, блок управления и исполнительные устройства.
В качестве входных устройств выступают радары с широким радиусом действия и видеокамеры, установленные спереди и сзади автомобиля. Критерием распознавания велосипедиста является скорость его движения (до 15 км/ч) и типовое очертание. Входные устройства определяют велосипедиста на расстоянии 10 м.
Сигналы от входных устройств обрабатываются ЭБУ. В зависимости от конкретной дорожной ситуации активизируются определенные исполнительные устройства, но не ближе чем за 5 м до велосипедиста.
Исполнительными устройствами системы Bike Sense являются:
- звуковой сигнал тревоги;
- надувные валики в спинке водительского сиденья;
- вибратор на педали акселератора;
- вибратор на внутренней ручке двери;
- светодиодная подсветка на внутренних элементах салона.
Для предупреждения об опасности используется звуковой сигнал велосипедного звонка, ассоциирующийся с велосипедистами. В зависимости от положения велосипедиста относительно автомобиля сигнал транслируется из левых или правых динамиков акустической системы.
В спинке водительского сиденья оборудованы специальные надувные валики. В зависимости от положения велосипедиста относительно автомобиля активизируется левый или правый валик, нажимая, соответственно, на левое или правое плечо водителя.
Вибратор на педали акселератора срабатывает для предупреждения нежелательного трогания автомобиля с места. Вибратор на внутренней ручке двери активизируется, чтобы предупредить опасное открывание двери, которой можно травмировать движущегося велосипедиста.
На передних стойках кузова, верхней части приборной панели, внутренней обивке дверей установлена комбинированная светодиодная подсветка зеленого, желтого и красного цвета. Светодиоды определенного цвета задействуются в зависимости от степени опасности столкновения с велосипедистом (зеленый — безопасно, желтый — возможная опасность, красный — опасно).
В алгоритме работы системы предупреждения о велосипедистах предусмотрены три типичные ситуации, на которые предлагается определенный набор действий:
- приближение велосипедиста сзади движущегося автомобиля:
- сигнал тревоги со стороны опасности;
- надувной валик со стороны опасности;
- светодиодная подсветка со стороны опасности;
- приближение велосипедиста (пешехода) в поперечном направлении впереди стоящего автомобиля перед пешеходным переходом:
- сигнал тревоги со стороны опасности;
- вибрация педали акселератора;
- приближение велосипедиста сзади стоящего автомобиля и намерение водителя или пассажиров выйти из автомобиля (открыть дверь):
- вибрация дверной ручки со стороны опасности;
- светодиодная подсветка со стороны опасности.
Несмотря на оригинальность и значимость данной системы, она не будет иметь решающего значения для повышения безопасности велосипедистов. Для защиты велосипедистов требуется изменение законодательства в части дорожного движения и развития велосипедной инфраструктуры.
Система обнаружения крупных животных
Столкновение с крупными дикими животными является серьезной проблемой дорожного движения. Особенно остро данный вопрос стоит в северных европейских странах — Швеции, Норвегии, Финляндии, а также в США и Канаде. Как показывает статистика, 6 % всех столкновений составляют аварии с участием крупных диких животных. Можно представить последствия столкновения со взрослым лосем для пассажиров и автомобиля. И чем выше скорость движения, тем серьезнее последствия аварии. Даже если водителю удалось уйти от столкновения с животным, удержать автомобиль на дороге и избежать аварии не всегда удается.
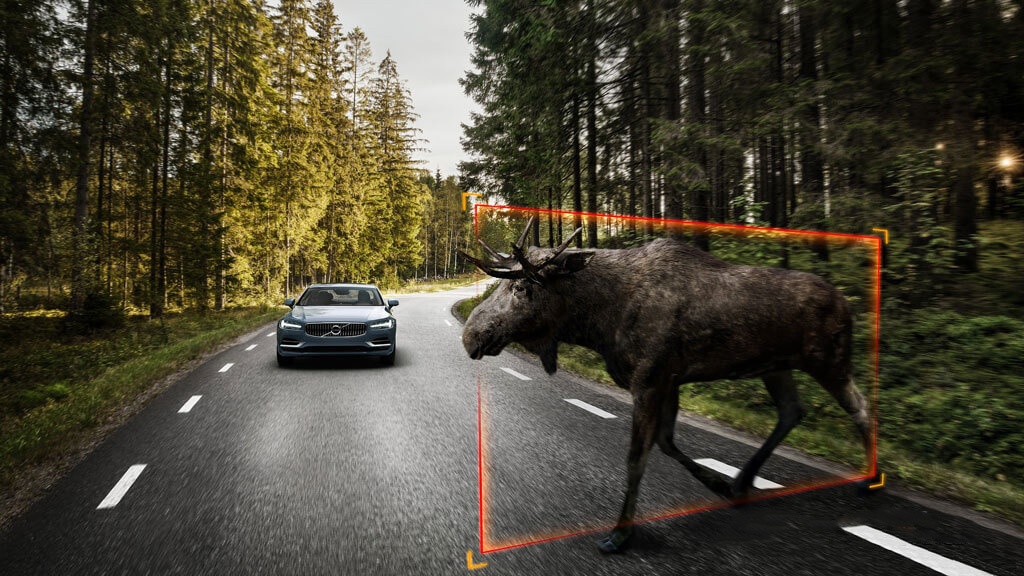
Шведская компания Volvo, первая из автопроизводителей, разработала систему обнаружения крупных животных и устанавливает ее на свои серийные автомобили. Система обнаружения крупных животных является дальнейшим развитием системы обнаружения пешеходов. Она использует те же аппаратные средства (видеокамеру, радар), что и Pedestrian Detection System, и отличается только программным обеспечением, которое позволяет распознавать форму диких животных, характер их перемещения.
Система определяет крупных диких животных (лося, оленя), а также домашних животных (лошадь, корову), животных меньшего размера (косулю, кабана) система не определяет. Для обнаружения диких животных используется видеокамера и радар, которые дополняют друг друга. При обнаружении животного система предупреждает водителя сигналом. При необходимости производится автоматическое экстренное торможение автомобиля. Если столкновения с животным избежать не удается, снижение скорости существенно уменьшает последствия аварии.
По-своему к решению проблемы безопасности подошли в Канаде, предложив придорожную систему обнаружения крупных животных. Пилотный проект Large Animal Detection System, LADS, отслеживает движение крупных диких животных и предупреждает водителя об их приближении к дороге.
Для обнаружения животных система использует датчики, которые располагаются на столбах вдоль дороги. Ранее в качестве таких датчиков использовался лидар, но по причине частых ложных срабатываний (из-за мелких животных, осадков, растительности) был заменен на радар.
Радар посылает сигнал во всех направлениях в радиусе 700 м. По отраженному сигналу система судит о наличии и направлении движения животных. Когда животное приближается к дороге, срабатывают сигнальные огни желтого цвета. Мигание огней происходит в течение 3 мин, хотя животное за это время может уйти далеко от дороги и не представлять опасность. Питание системы производится от солнечных батарей и резервных аккумуляторов.
Как заявляет производитель, система LADS снижает опасность столкновения с крупными животными до 80 %.
Просмотров: 135